“京天机器人已经累计服务2127位高校用户。专注提供科研,教学,比赛和展示等方案。并在定位导航、人机协作、危险场景作业、多机协作、机器人控制和分析、勘测、机器视觉运动目标跟踪、智能机器人仿真与虚拟教学、人工智能/智能机器人实验室建设、机器人竞赛等多个领域拥有完整落地案例”
在具身智能领域,视觉 - 语言 - 动作(VLA)模型虽能迁移语义先验,但受限于静态图像 - text 预训练,难以捕捉物理动态;而视频生成模型虽蕴含丰富时空与物理信息,却未能与动作控制
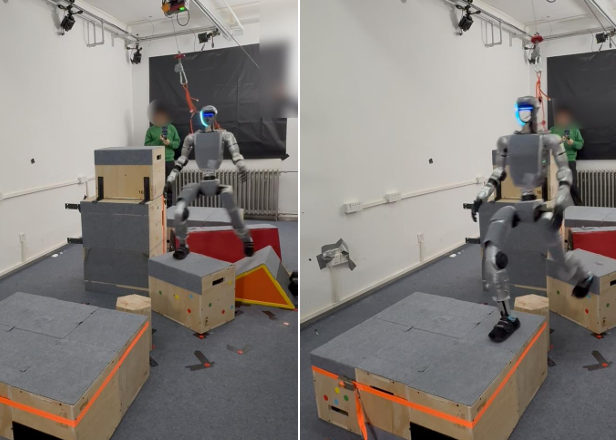
在具身智能领域,让人形机器人在未知复杂地形上实现高动态跑酷,始终是极具挑战性的课题。尽管通用运动策略已能应对多种常规地形,但面对楔形、桩体、窄梁等极端几何结构的障碍时,往
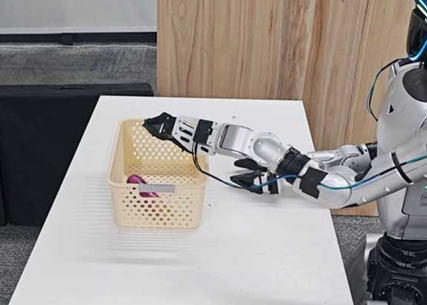
上海交通大学、上海人工智能实验室等联合提出的MLM(Multi-task Loco-Manipulation),是一款基于强化学习的多任务全身运动操纵框架。它融合真实世界与仿真数据,专为配备六自由度机

清华大学等团队提出的Hiking in the Wild,是一款面向复杂非结构化环境的人形机器人敏捷行走框架。它以 “端到端感知 - 控制” 为核心,通过深度图像实时感知地形,结合地形边缘安全

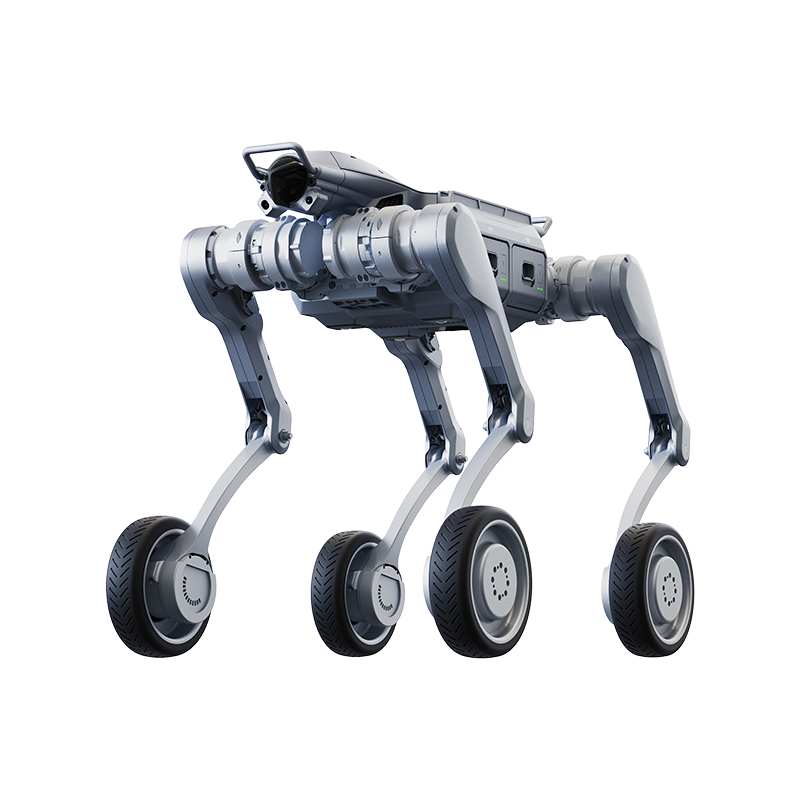
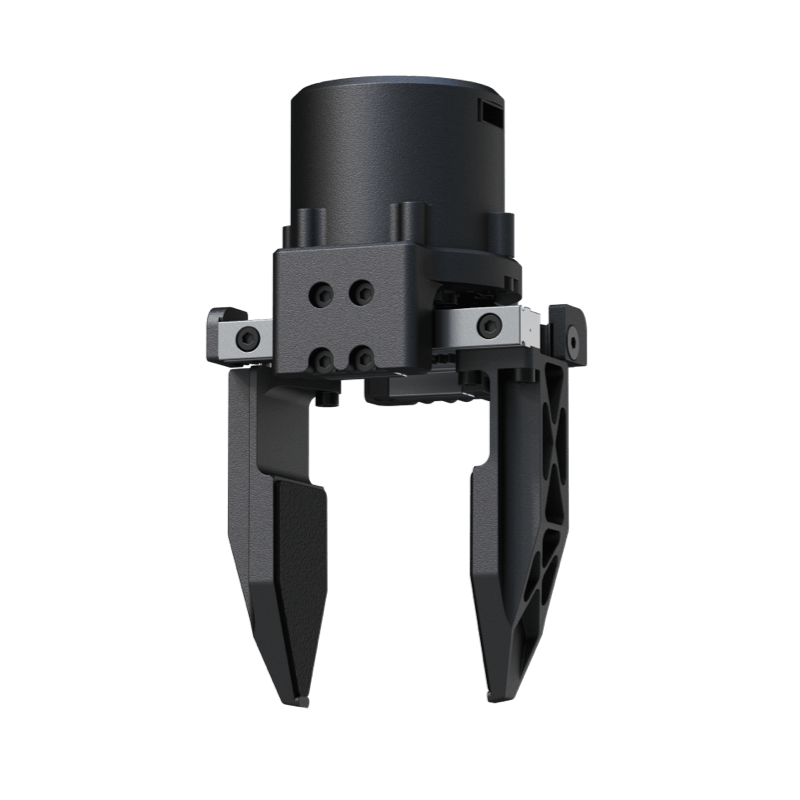
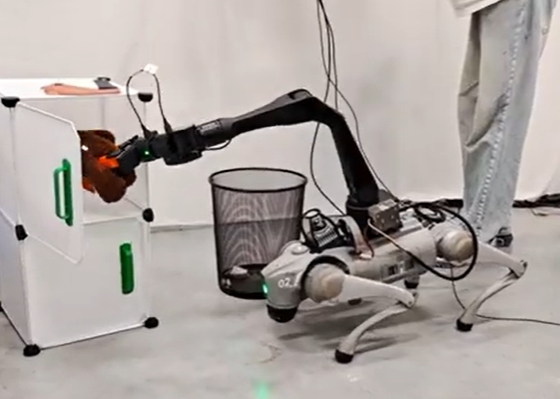
当四足机器人在复杂地形执行物资运输、搜索救援等任务时,维持其自身稳定性是一个巨大挑战。特别是当负载具有“主动性”和“动态性”时——例如在机器人背部加装一个正在作业的机械臂
 Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877
Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877 商务合作:18062020215
销售咨询:18062020221
服务热线:027-87522899
 |
 |