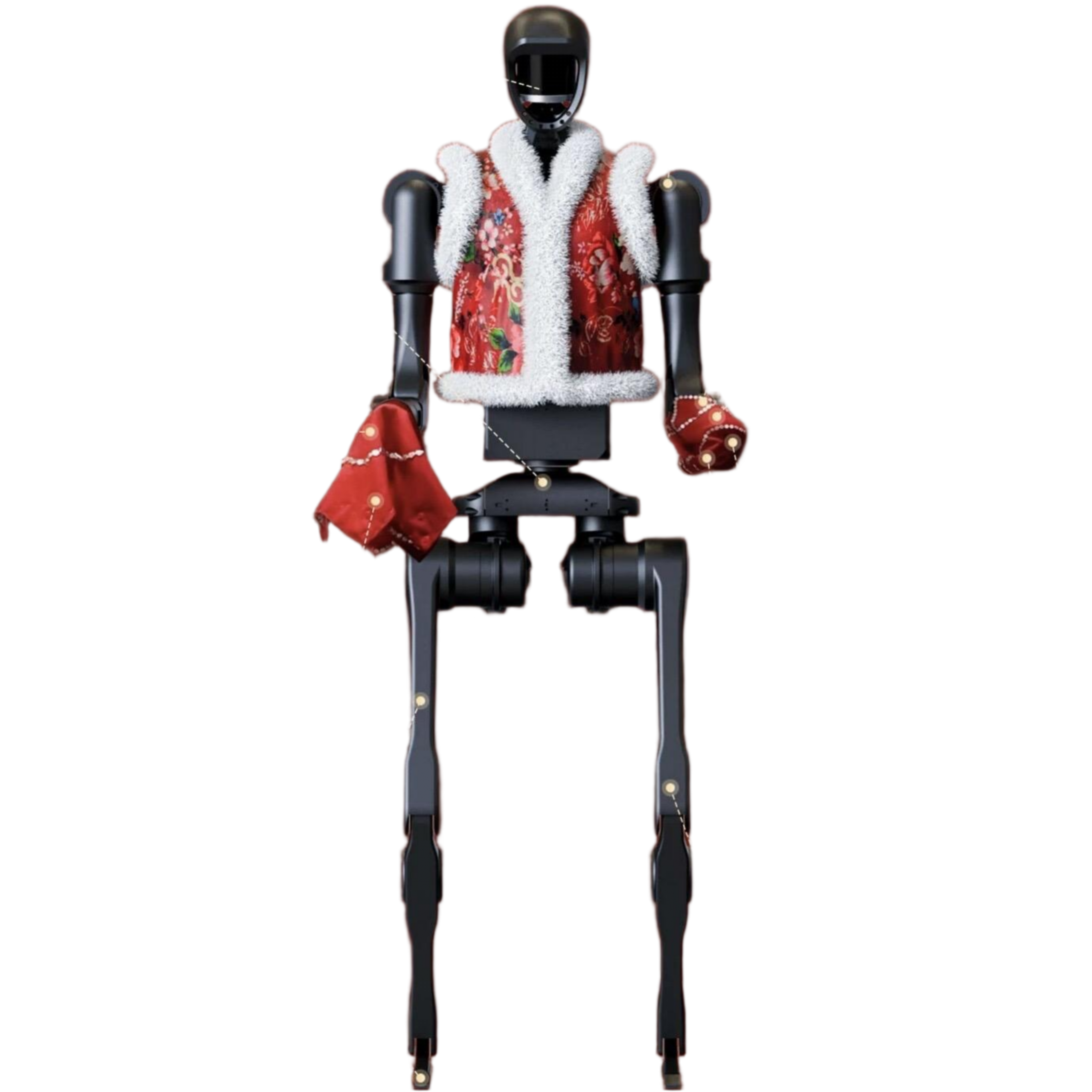
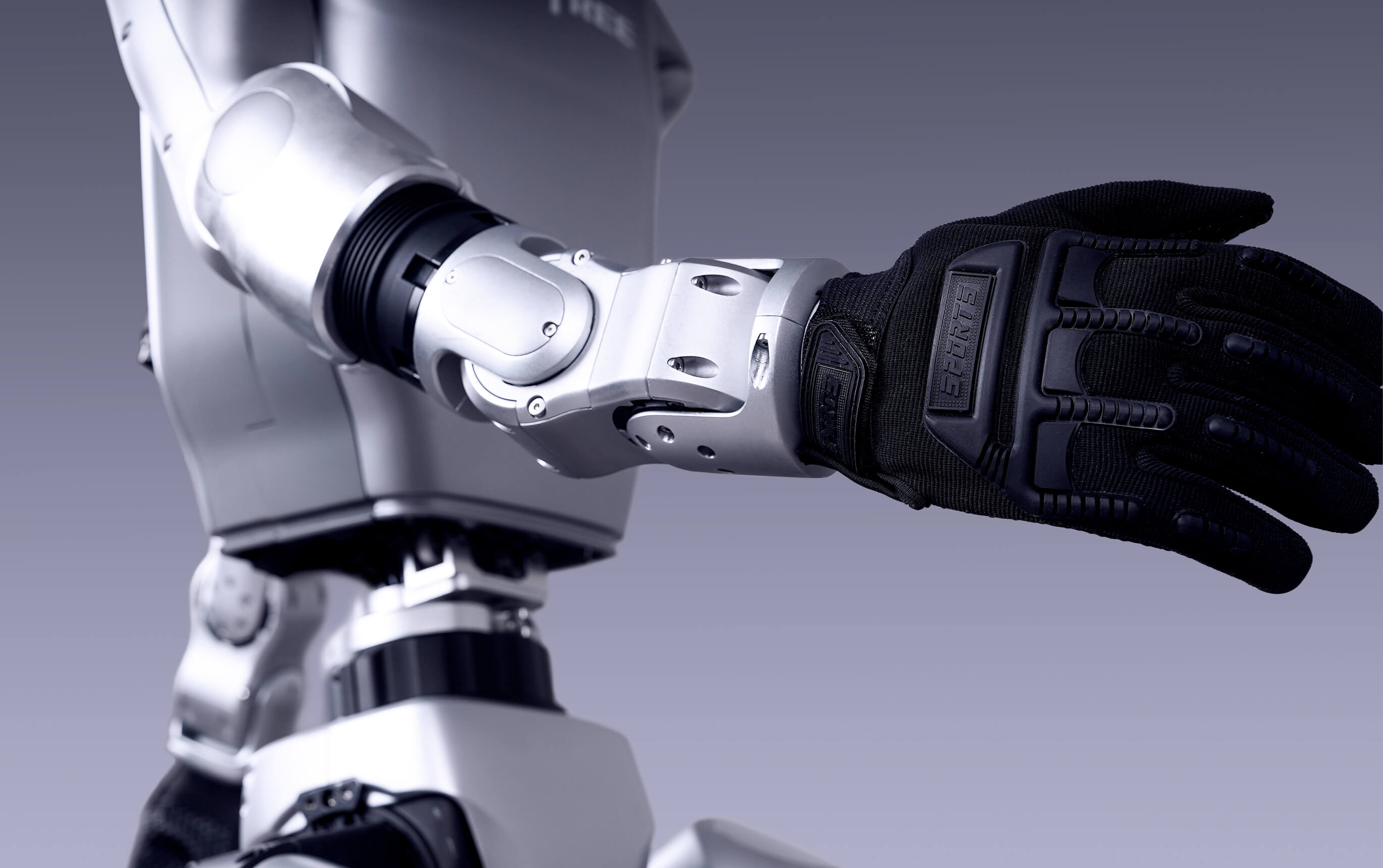
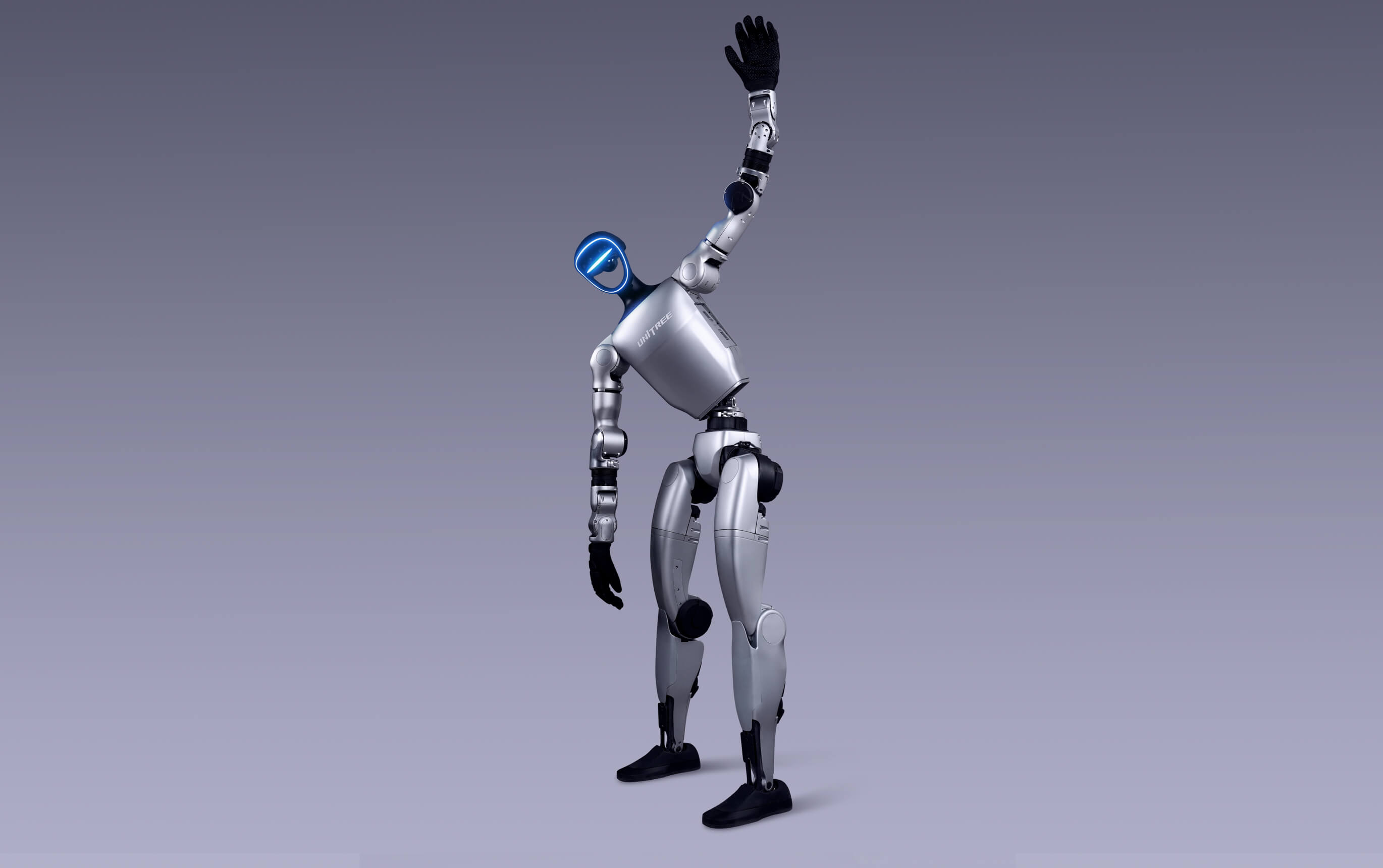
G1-Edu人形机器人采用轻量化材料设计,整体高132cm,重约35kg,整身拥有29个自由度(不含手部自由度),行走姿态轻盈稳健,整机中空关节走线,无外置线缆。核心运动模组峰值扭矩达到了120N·m,最快速度可达2m/s。除了激光雷达和深度相机,还配置了3指力控灵巧手(可加选配件安装多点触觉阵列)。在人形机器人里面拥有最灵活的腰部,其3个自由度,X轴可活动±45°、Y轴可活动±30°、Z轴可活动±155°。


| 高*宽*厚(站立) | 1320*450*200mm |
| 重量 | 35公斤+ |
| 单腿自由度 | 6 |
| 单手臂自由度 | 7 |
| 膝关节最大扭矩 | 120N.m |
| 小腿+大腿长度 | 0.6m |
| 超大关节运动空间 | 腰部Z轴关节:±155° 膝关节:0~165° 髋关节:P±154°、R-30~+170°、Y±158° |
| 关节编码器 | 双编码器 |
| 高*宽*厚(折叠) | 690*450*300mm |
| 自由度 | 29(不含手部自由度) |
| 腰部自由度 | 3 |
| 单手自由度 | 7(可加选多点触觉阵列)+2(可加选2个手腕自由度) |
| 手臂最大负载 | 约3Kg |
| 手臂臂展 | 约0.45m |
| 全关节中空内走线 | 有 |
| 基础算力 | 8核高性能CPU(可选配加高算力模组NVIDIA Jetson Orin) |

拥有11个自由度,其中6个电机。自重383g,尺寸16*7.6厘米,单手可负载20Kg。0.1毫米的操作精度,握力可达50N,有三款颜色可选分别是深空灰、流光银和晨曦金。通讯接口RS485
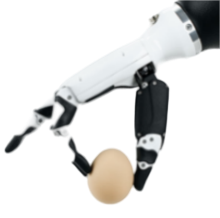
手指关节12个,其中有6个电机。最大负重3Kg,自重540g,拇指最大抓握力15N,四指最大抓握力10N。抓握力分辨率0.5N,±0.20mm重复定位精度。控制接口RS485。可选配2个自由度手腕关节。

尺寸:216.43×100×41.42mm,重量:300g。 5小时续航,丰富按键,可以适配宇树G1、H1、H2、GO2、B2、A2等。 一机多用,轻松迁移。通讯方式:无线数传、蓝牙。

宇树自研五指灵巧手,16个主动自由度和4个从动自由度。自重1100克。四指侧摆±22°,指尖重复定位精度±1mm,指尖力10N,最小抓握直径10mm。最大负重3.5kg。





 Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877
Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877 商务合作:18062020215
销售咨询:18062020221
服务热线:027-87522899
 |
 |