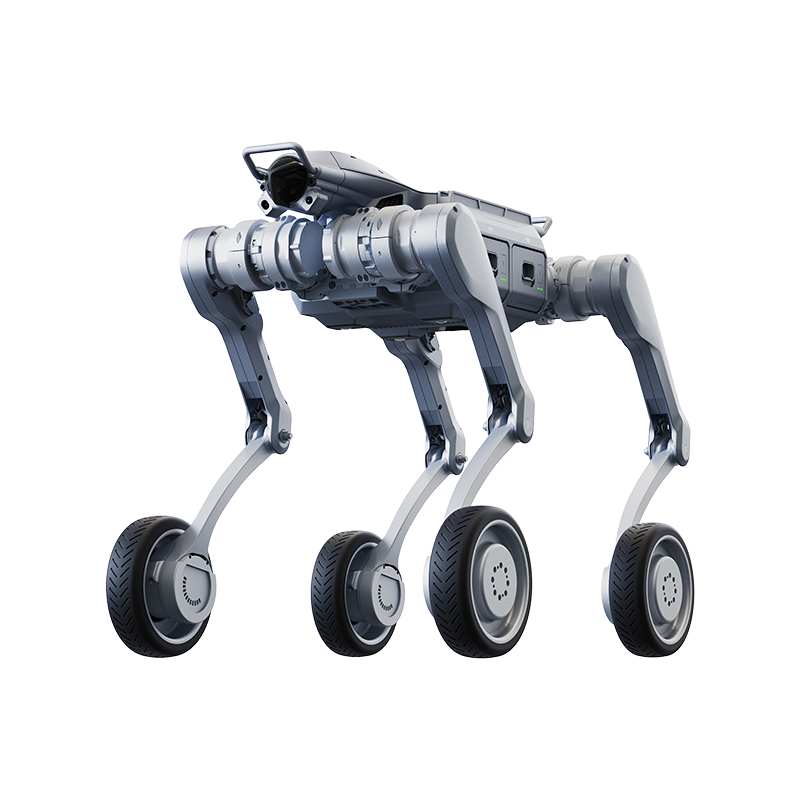
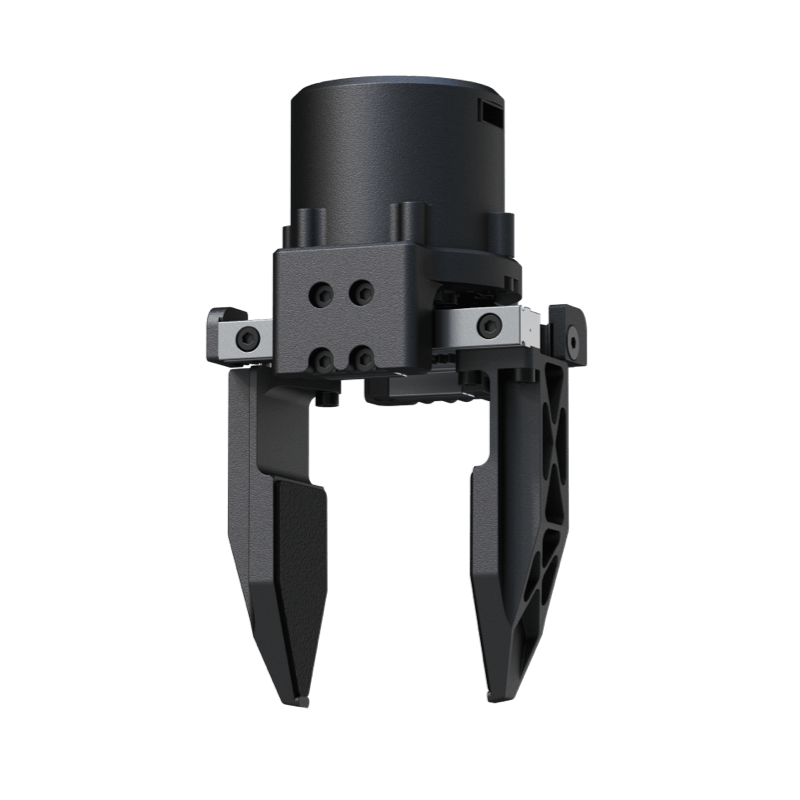
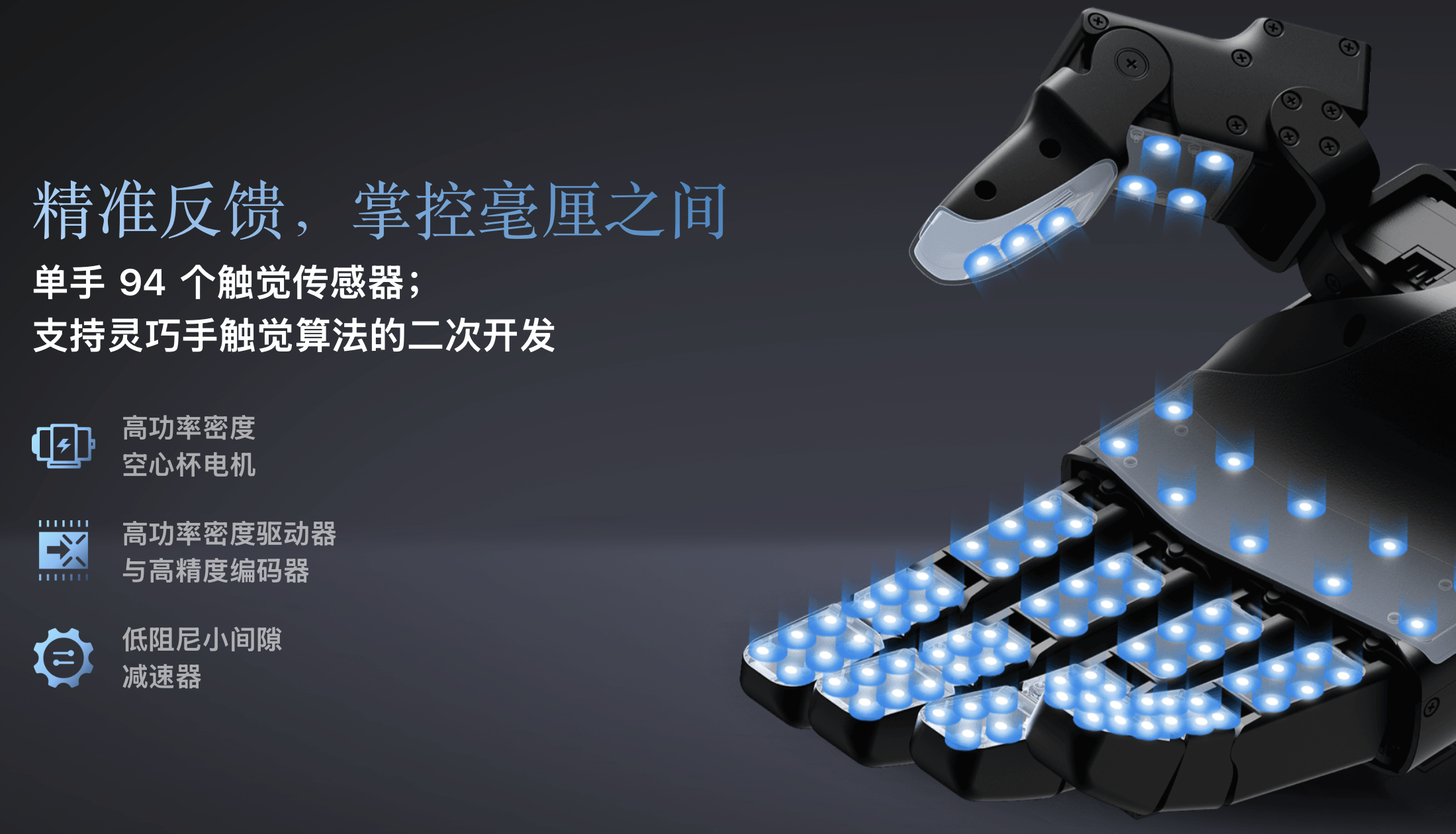
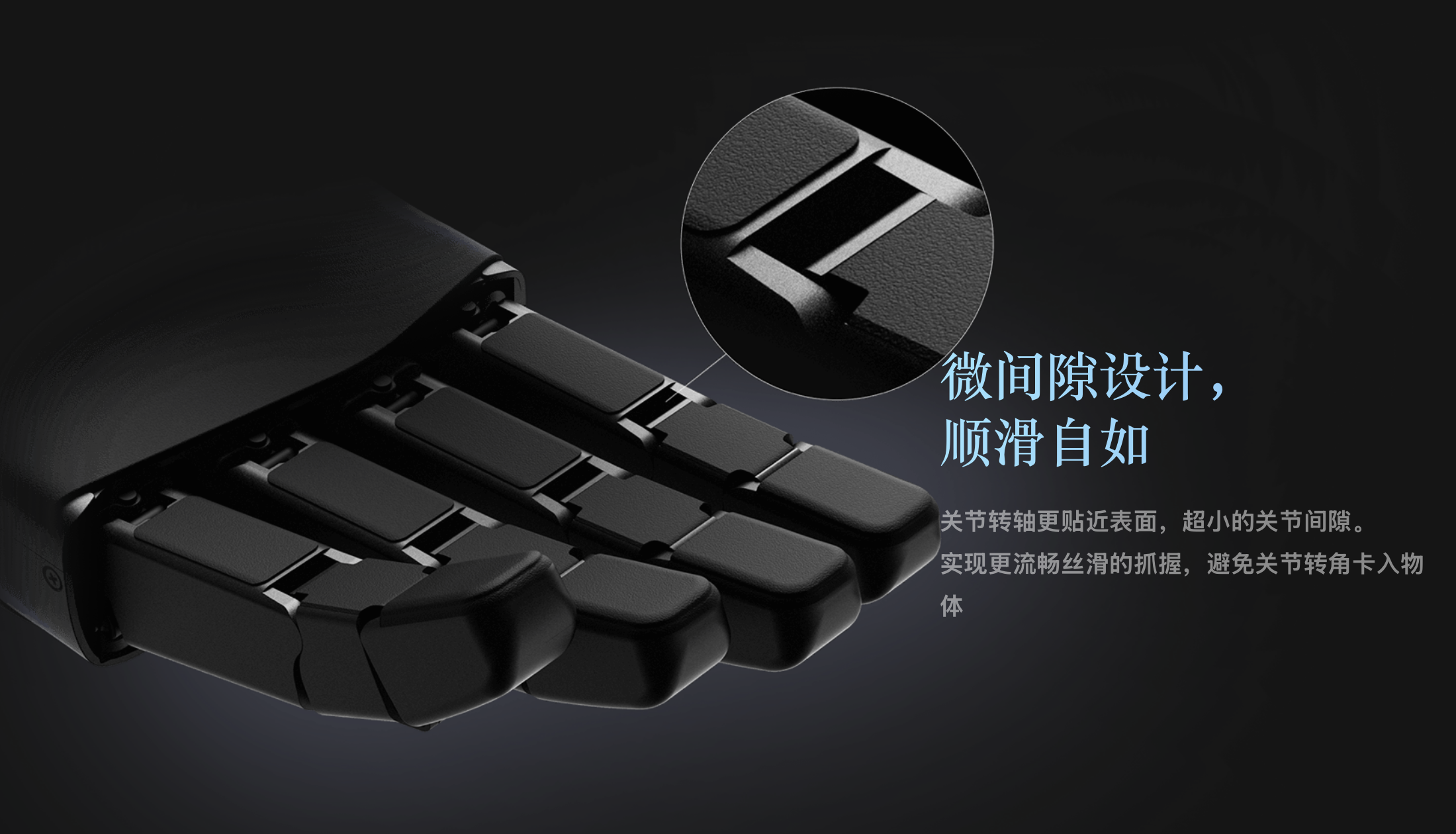
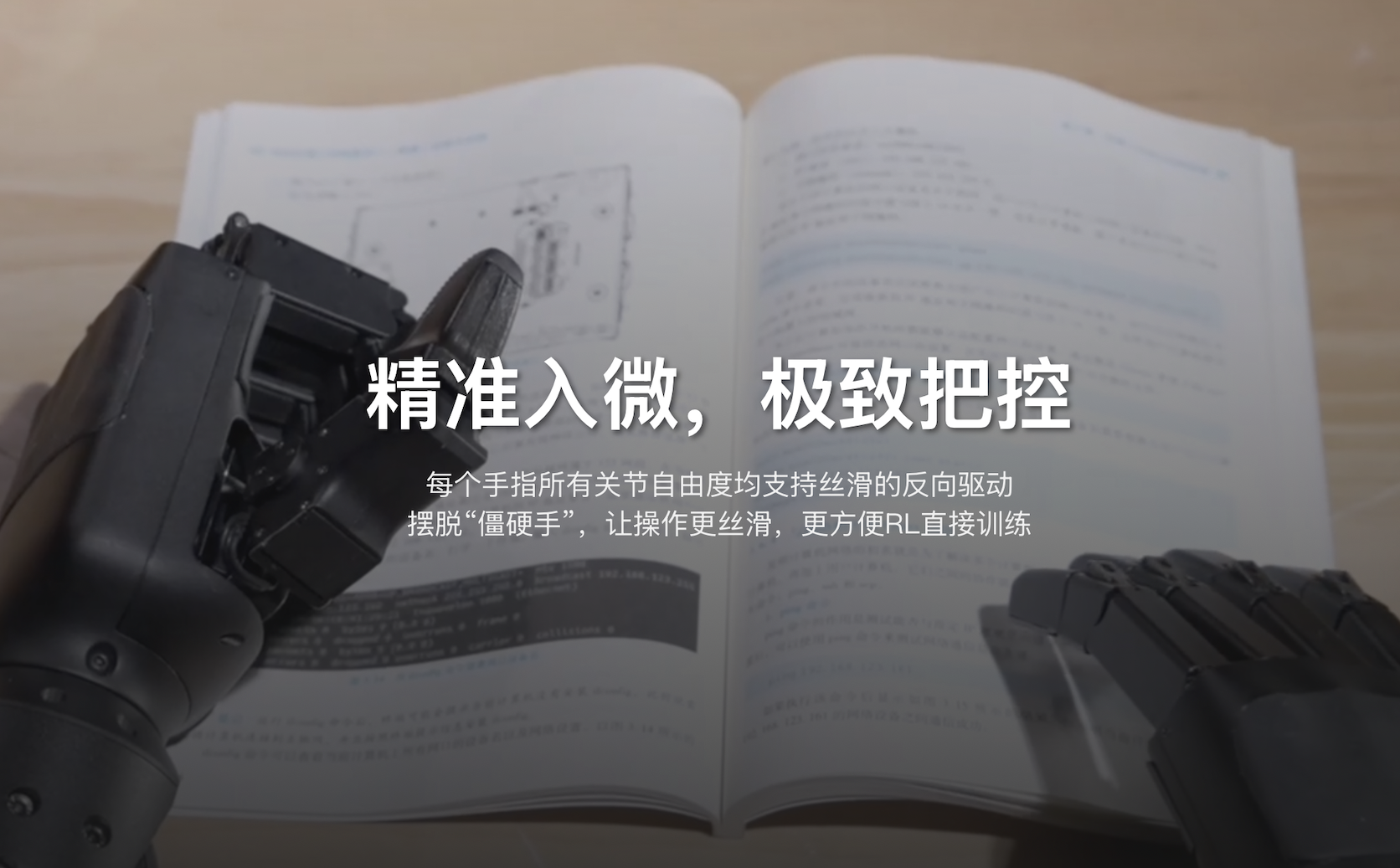
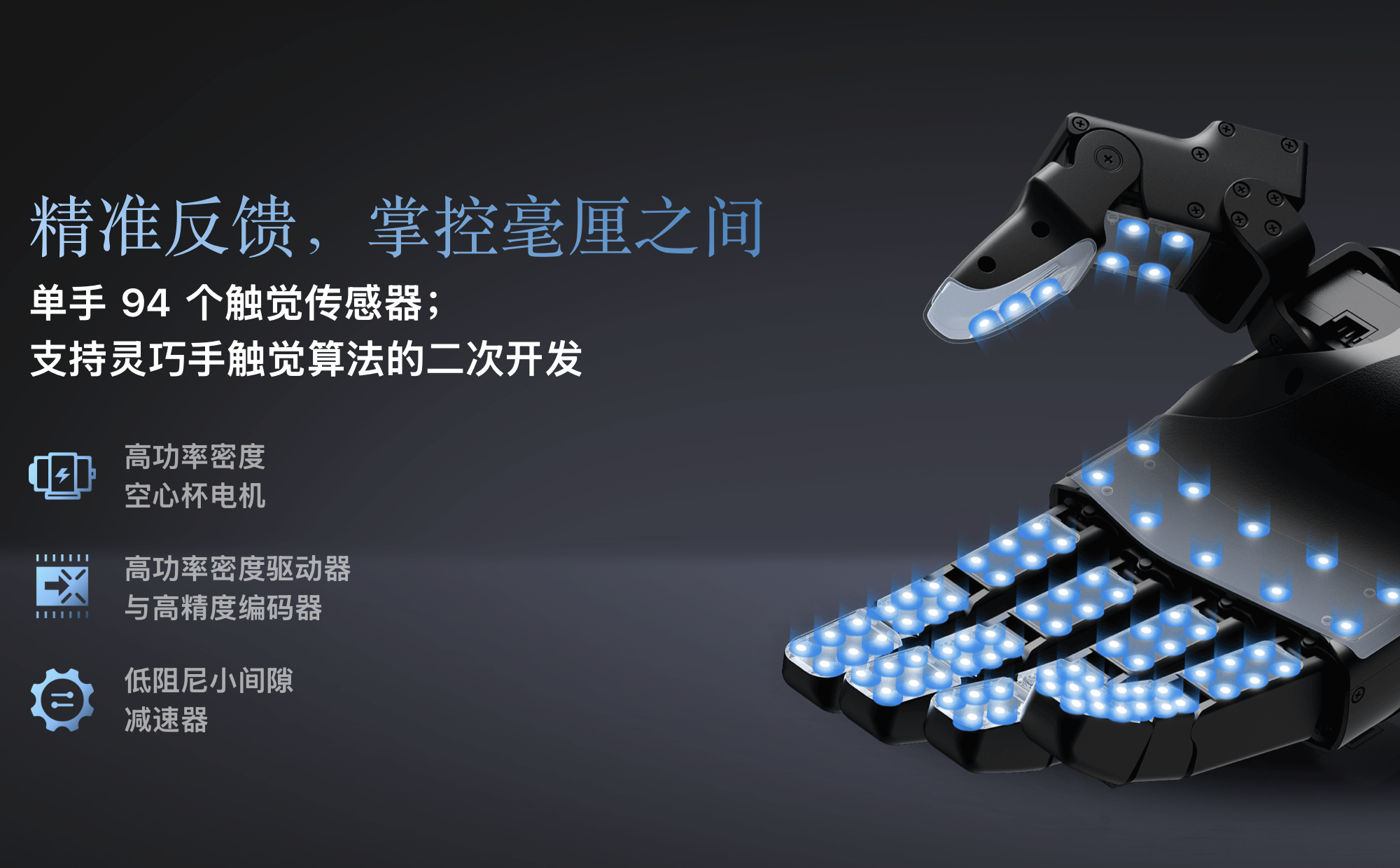
宇树自研五指灵巧手为宇树 H1/G1/H2等人形机器人设计的高性能末端执行器,主打仿生精细操作、柔顺力控与强化学习友好,适配工业装配、科研实验、服务机器人等场景;有基础版 Dex5-1 与带完整触觉传感的 Dex5-1P 两个型号;五指均可独立更换。 总自由度 20(16主动+4被动);拇指4自由度,其余四指各3自由度。 12个自研微型力控复合传动关节 + 4个微型力控齿轮传动关节;全关节支持丝滑反向驱动,无“僵手”感。四指侧摆 ±22°,贴合曲面/不规则物体;最小抓取直径10mm;指尖重复定位精度 ±1mm。 指尖力10N;朝下负载3.5kg、侧握负载4.5kg(室温抓5cm圆硬物)。 反馈数据:关节位置/速度/扭矩/温度、电压电流、IMU;支持位置/速度/扭矩/阻抗控制 •Dex5-1P 配置 94个触觉压力传感器(掌10+每指多组),支持触觉算法二次开发;基础版可按需选配。 可流畅完成打牌、拧魔方、翻薄书、精细插拔、装配等拟人化操作;适合强化学习(RL)直接训练;与宇树人形机器人无缝对接,便于快速部署与二次开发。

| 硬件参数 |
|
| 感知参数 |
|




 Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877
Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877 商务合作:18062020215
销售咨询:18062020221
服务热线:027-87522899
 |
 |