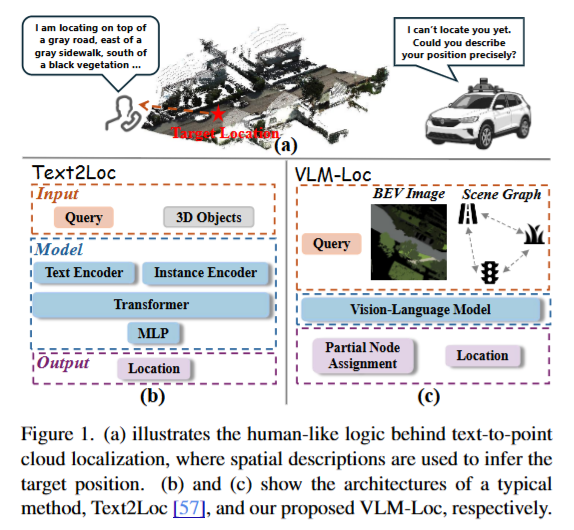
来自南开大学、武汉大学、慕尼黑工业大学等机构的研究团队提出了一种新方法VLM-Loc,让机器能够理解人类用自然语言描述的空间位置,并在 3D 点云地图中找到对应的位置。
了解更多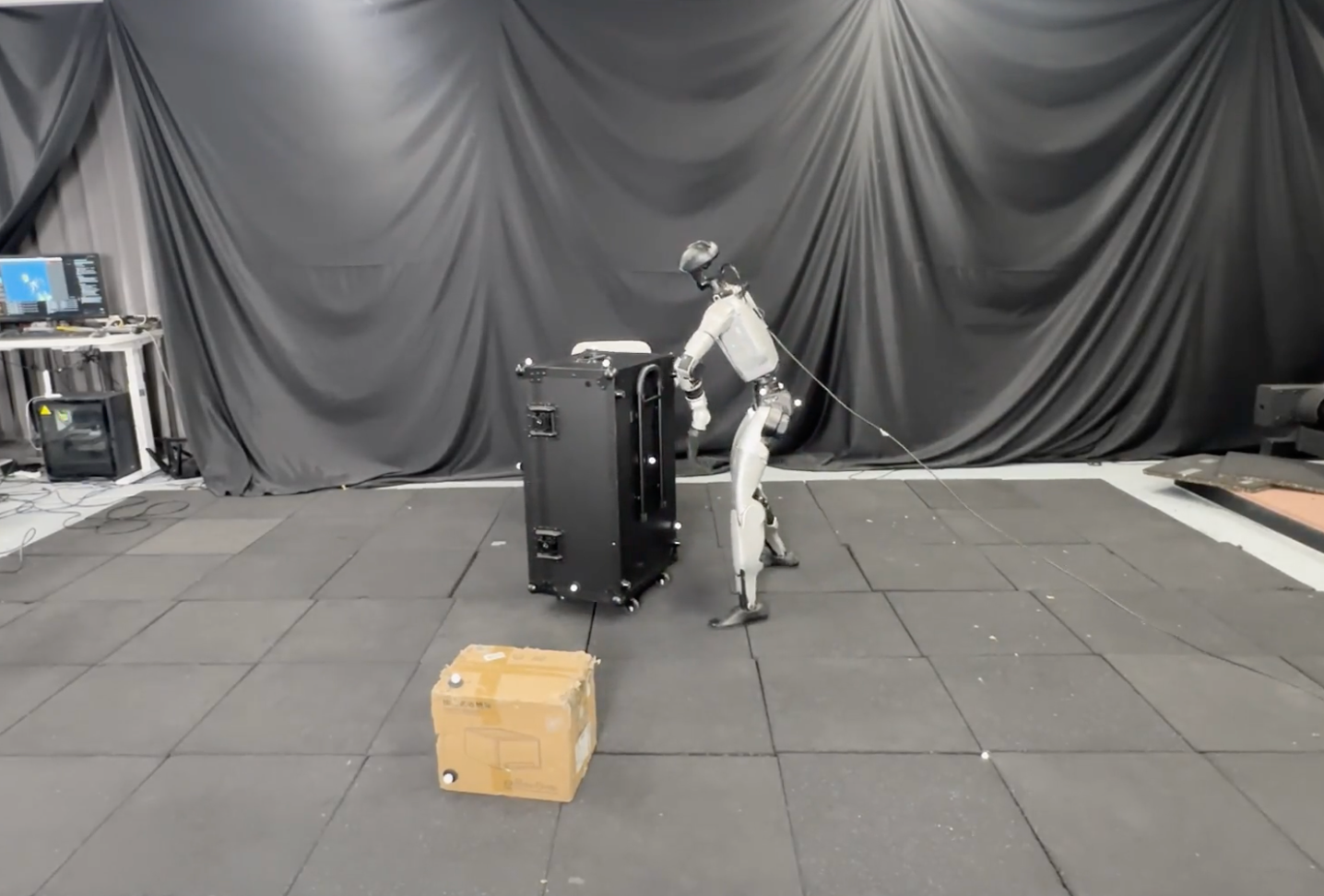
北京大学人工智能研究院发表论文《基于距离场的人形机器人长时域交互通用框架》,提出LESSMIMIC框架,以距离场(DF)为统一交互表征,通过三阶段训练流程(行为克隆、对抗微调、视觉蒸馏),使单个策略具备几何泛化与长时域技能组合能力。
了解更多
EgoScale,是一款基于大规模第一视角人类数据构建的视觉 - 语言 - 动作(VLA)迁移框架。它突破现有研究的数据规模瓶颈,在 2 万小时带动作标签的第一视角人类视频上训练,规模达到此前同类研究的 20 倍以上,还发现人类数据规模与模型验证损失的对数线性缩放定律,成功实现从人类操作到机器人灵巧动作的高效迁移,为通用人机灵巧操作提供了数据高效、泛化性强的解决方案。
了解更多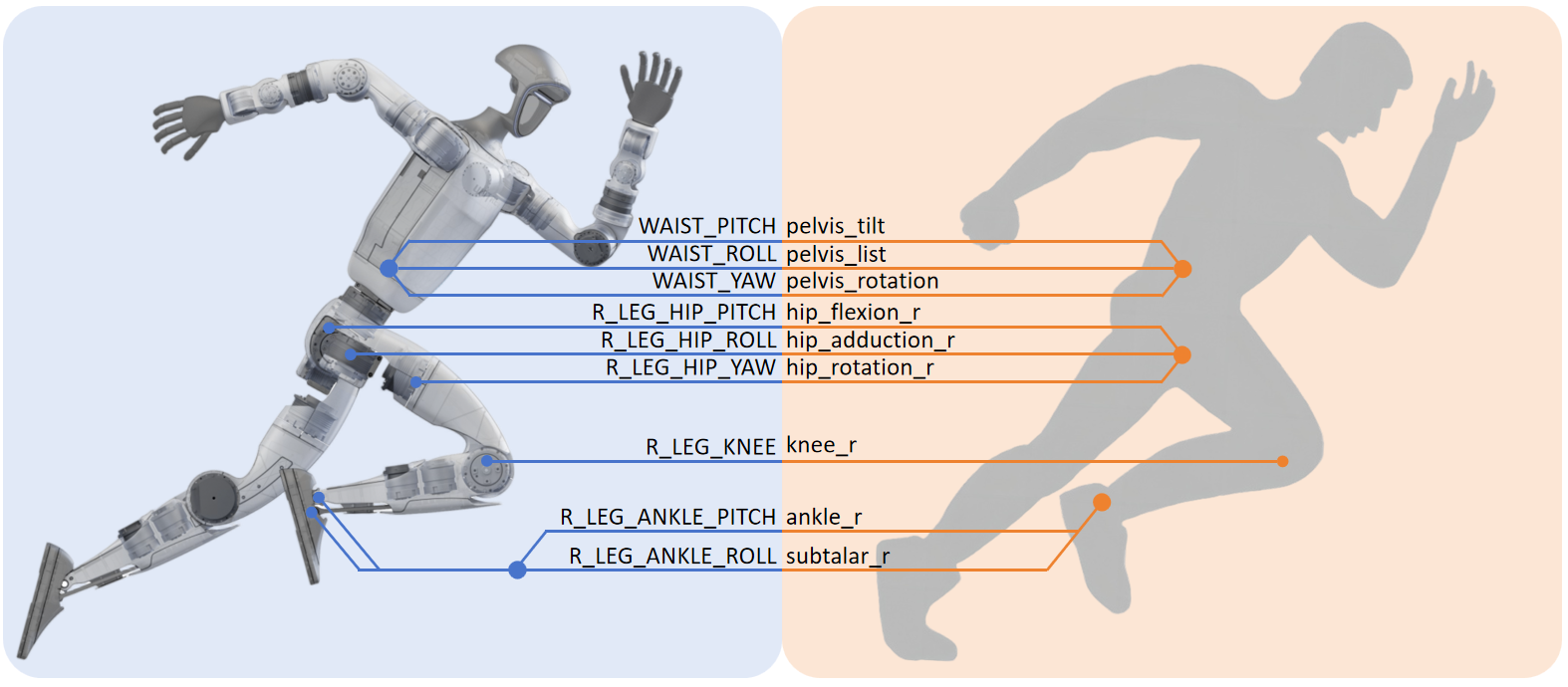
具备自然类人行走能力的人形机器人,是实现人机共存的重要基础。随着人形机器人逐渐从受控实验室环境走向家庭、工作场所和公共空间,其步态质量不仅直接影响运动效率,还影响公众的接受程度。不自然的机械步态可能显得生硬、不适,并加速关键部件的磨损;相反,流畅且具有生物仿真特性的步态不仅能够提高机器人运行效率,还可作为理想平台,用于测试外骨骼等康复辅助设备,从而减少对人体
了解更多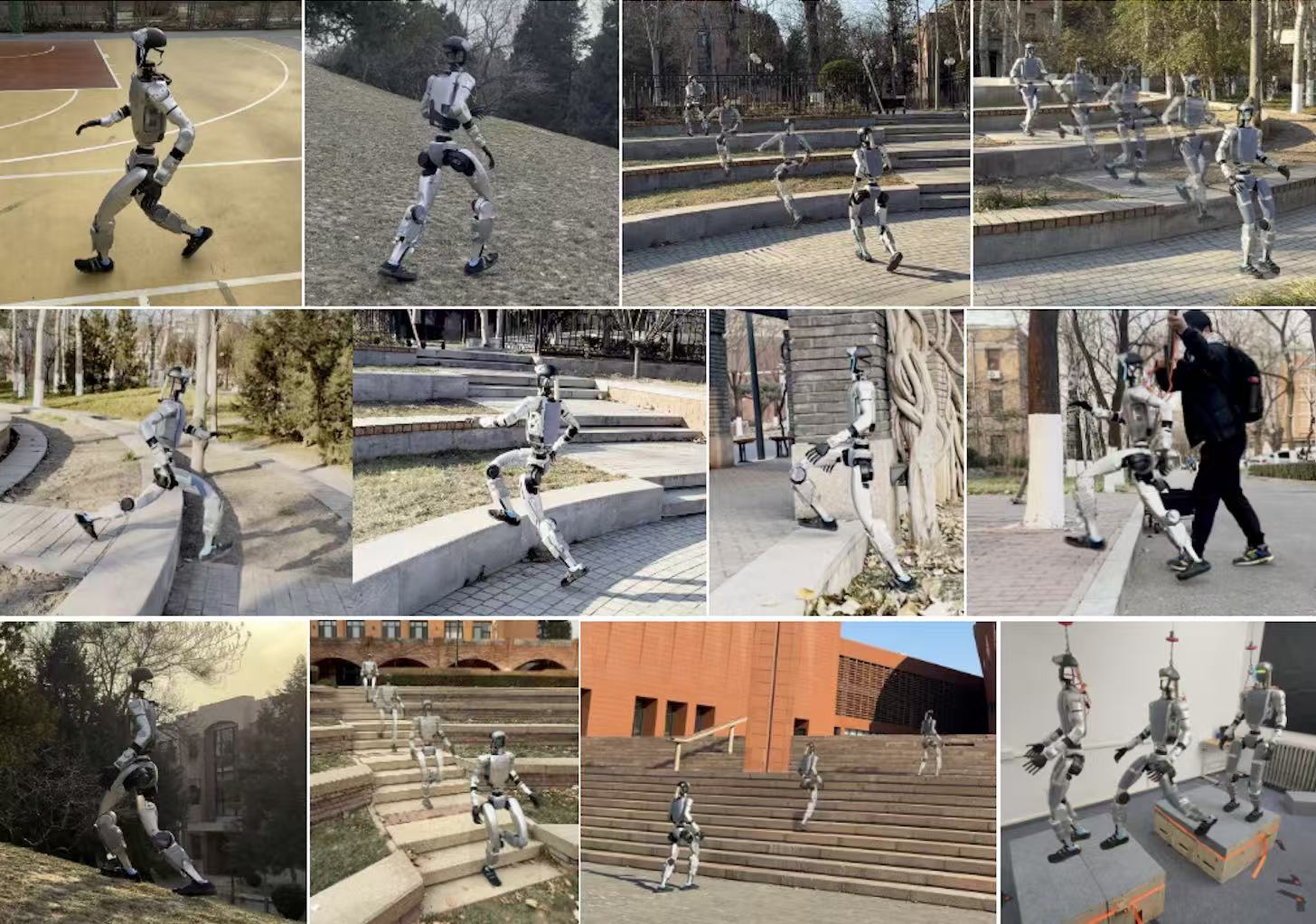
清华大学等团队提出的Hiking in the Wild,是一款面向复杂非结构化环境的人形机器人敏捷行走框架。它以 “端到端感知 - 控制” 为核心,通过深度图像实时感知地形,结合地形边缘安全机制与自适应指令生成策略,让人形机器人实现零样本仿真到现实迁移,在室内外复杂地形(楼梯、斜坡、间隙、高台)中以最高 2.5 m/s 的速度稳健行走,突破传统方法在动态性、安全性与泛化性上的三重局限。
了解更多
人形机器人具有无与伦比的多功能性,可以执行类似人类的全身技能。然而,由于模拟和现实世界之间的动力学不匹配,实现敏捷和协调的全身运动仍然是一个重大挑战。现有的方法,如系统识别(SysID)和域随机化(DR)方法,通常依赖于劳动密集型的参数调整,或者导致牺牲敏捷性的过于保守的策略。
了解更多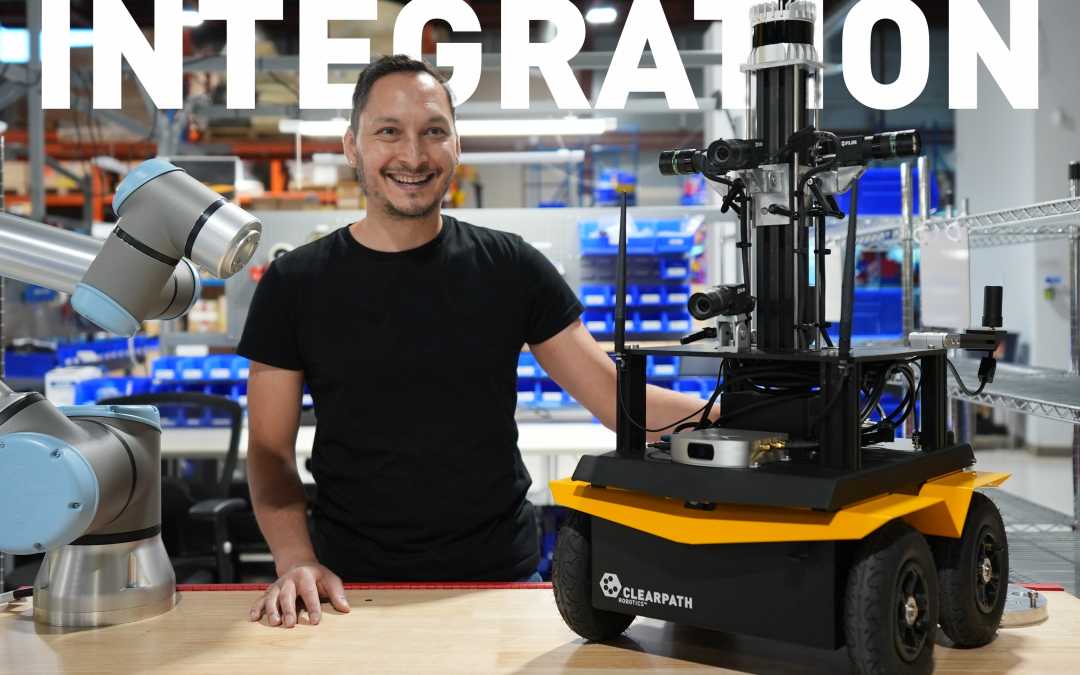
相机是移动机器人的基本组成部分,提供基本的视觉数据,使机器人能够感知、解释周围环境并与之互动。在这个集成方案里,我们的团队为玄武2号UGV室内外移动小车配备了一系列FLIR Blackfly摄像头,以及一套额外的传感器和量身定制的传感器。这些定制增强传感器融合能力,并提高导航和分析复杂动态环境的性能。
了解更多
在繁忙的铁路运输世界中,效率至关重要。铁路调车场是列车组装、分拣和调度的关键枢纽,在确保货物和乘客按时到达目的地方面发挥着关键作用。然而,这些场地内的复杂操作通常是手动的,可能会成为瓶颈,导致延误和运营成本增加。“玄武3号”是我们完全自主集成的机器人平台,使开发人员能够加速工业应用自动化检测解决方案的部署。
了解更多
“玄武3号”是京天机器人团队集成的自主巡检机器人,最近被部署在一个大型太阳能设施中。它的任务是自主导航无数排太阳能电池板,并使用其机载热像仪识别任何潜在安全风险问题。
了解更多
卡内基梅隆大学的研究团队近日发表了一项创新研究,该团队开发出了一个实时人对人形机器人(human to humanoid,简称H2O)的全身遥控系统。值得一提的是,实验中的人形机器人为Unitree的H1-ReS人形机器人,最近它们同样进化走得更快了(3.3m/s),并可进行原地后空翻。
了解更多 Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877
Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877 渠道商务合作:18062020215
售前技术咨询:13807184032
售后服务热线:18062020228
 |
 |