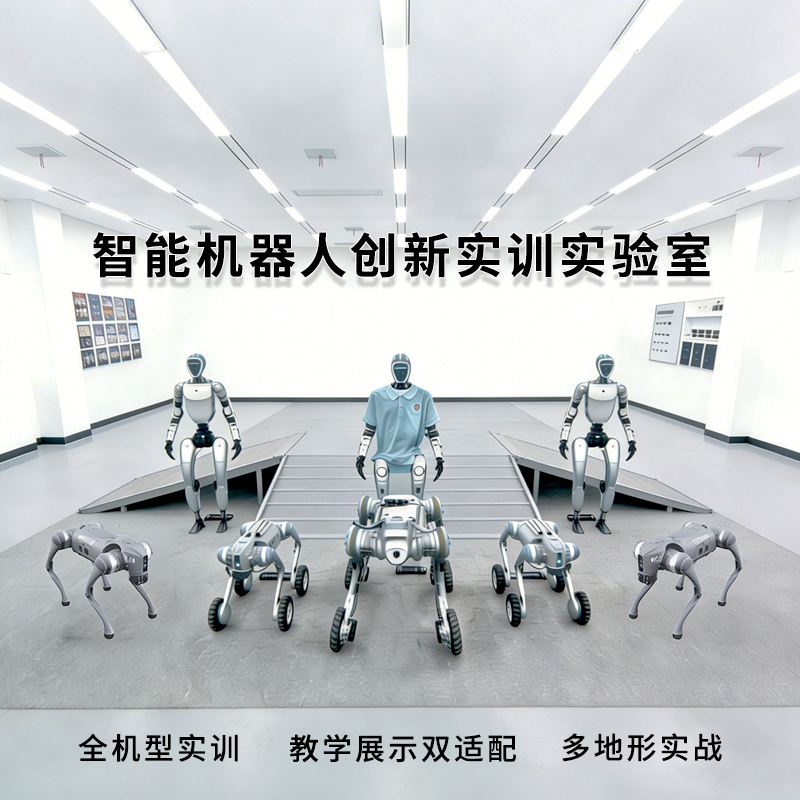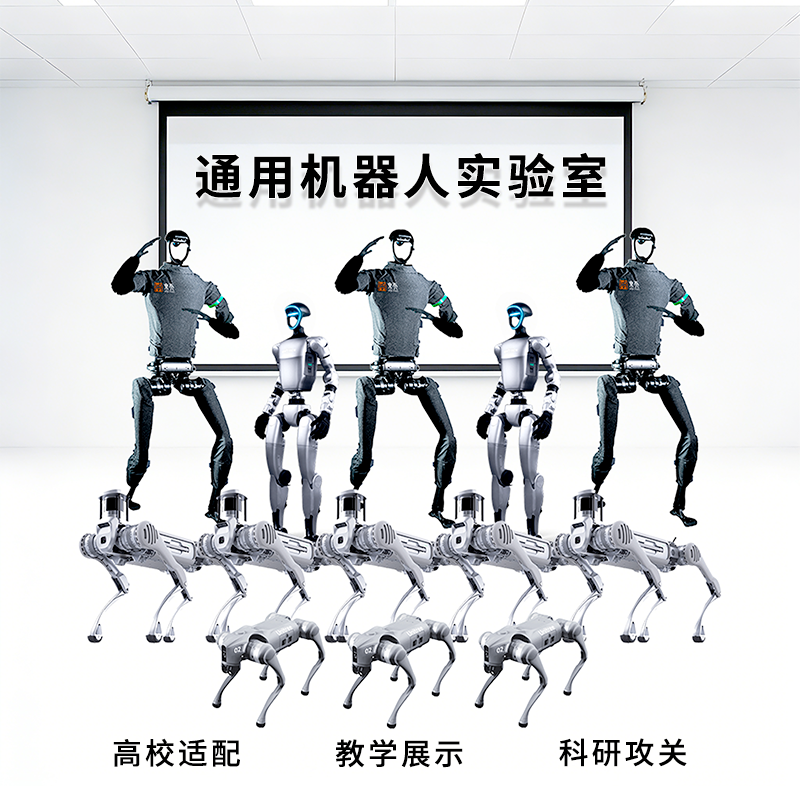
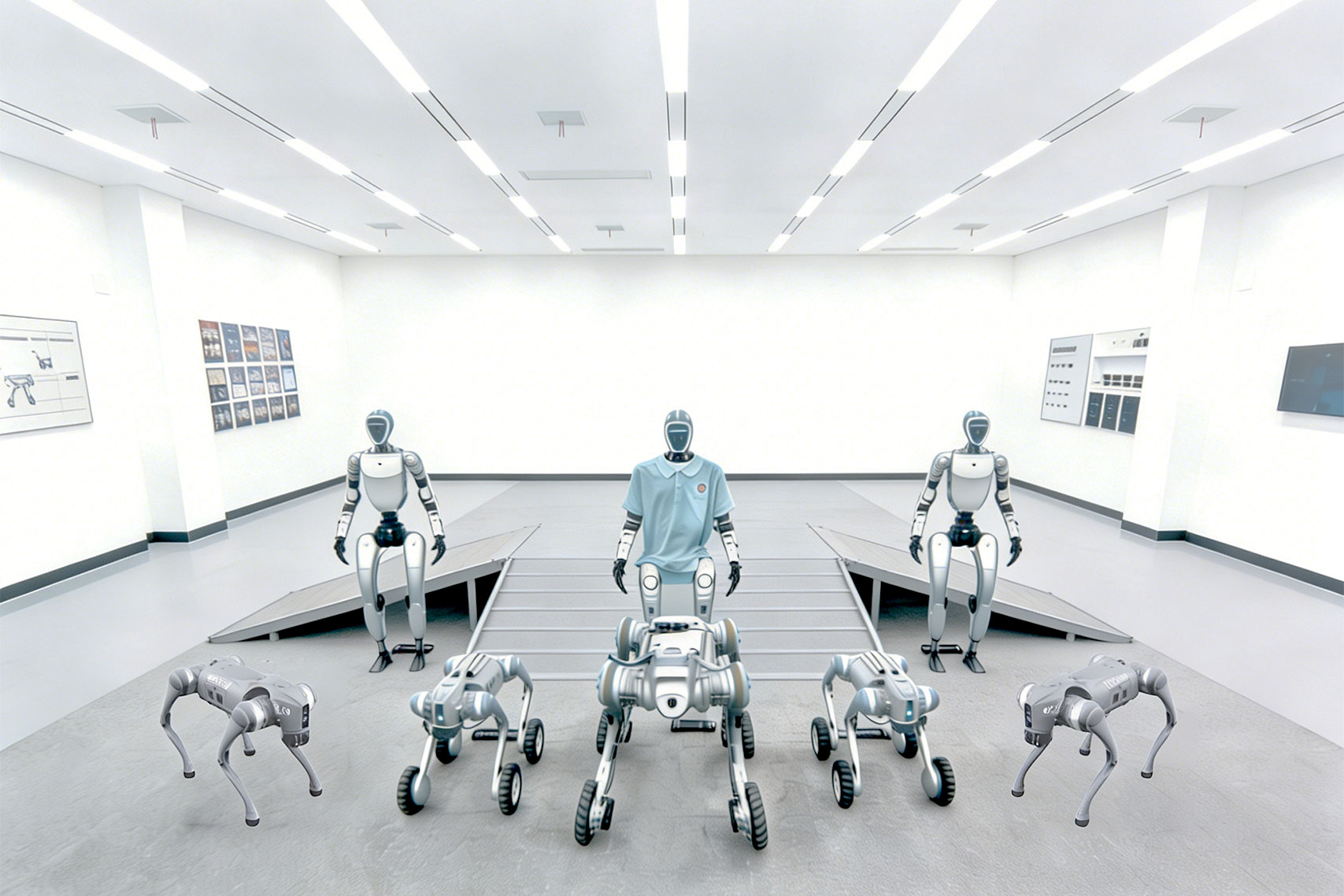
本方案围绕智能科学与技术专业智能机器实训教学需求,构建了包含3个仿人机器人、2个小型四足机器狗、2个全地形轮足机器狗和1个行业级大负载机器狗的智能机器人集群和配套实验场景环境。 方案采用 “基础验证平台 — 核心研究平台 — 前沿探索平台” 三层架构,分别对应专业 “低年级入门实验 - 中年级核心实验 - 高年级创新实验” 三个教学阶段,形成 “循序渐进、层层递进” 的实验教学支撑体系。 该方案不仅能全面提升学生的工程实践能力、创新设计能力与团队协作能力,更为培养适应人工智能与机器人产业发展需求的高素质复合型技术人才提供坚实硬件支撑与教学保障。
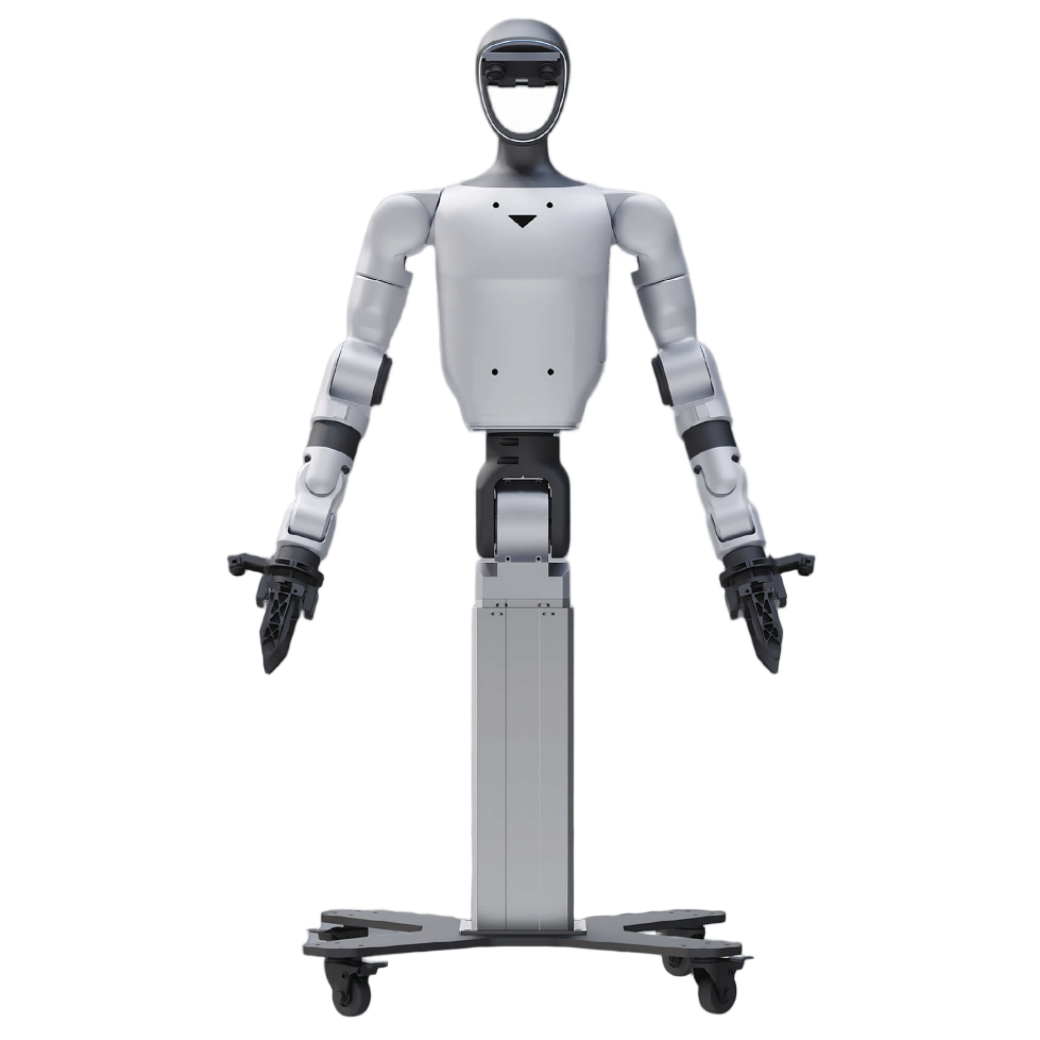
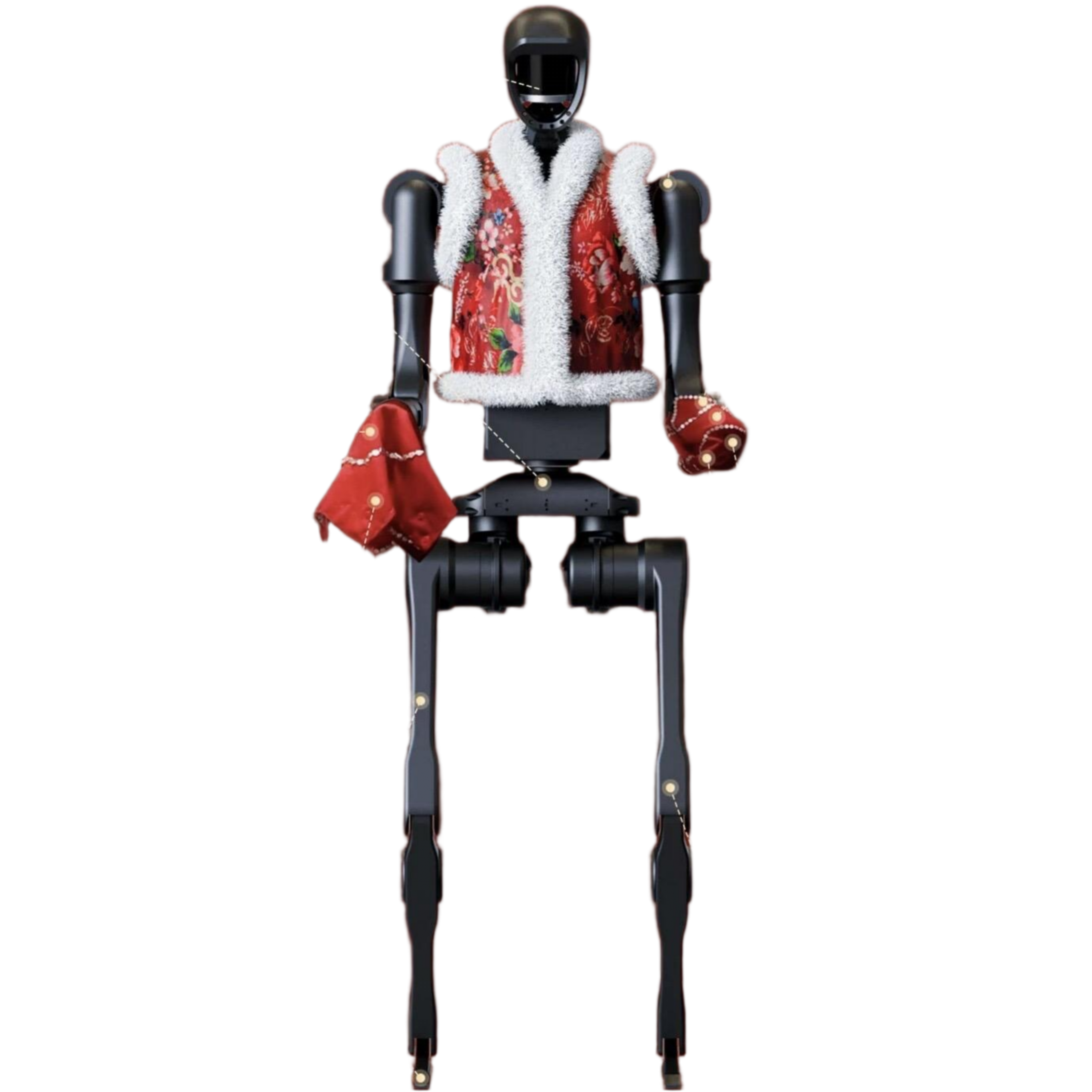
| 人形机器人 | 站立尺寸:1320×450×200mm 整机重量:约35kg 大腿+小腿长度:0.6m 膝关节扭矩:120N.m 手臂最大负载:3kg 传感器:深度相机+3D激光雷达+5W立体声扬声器+麦克风阵列 算力拓展坞:含高算力硬件模组、AI算法及技术支持, 内置云控算法
|
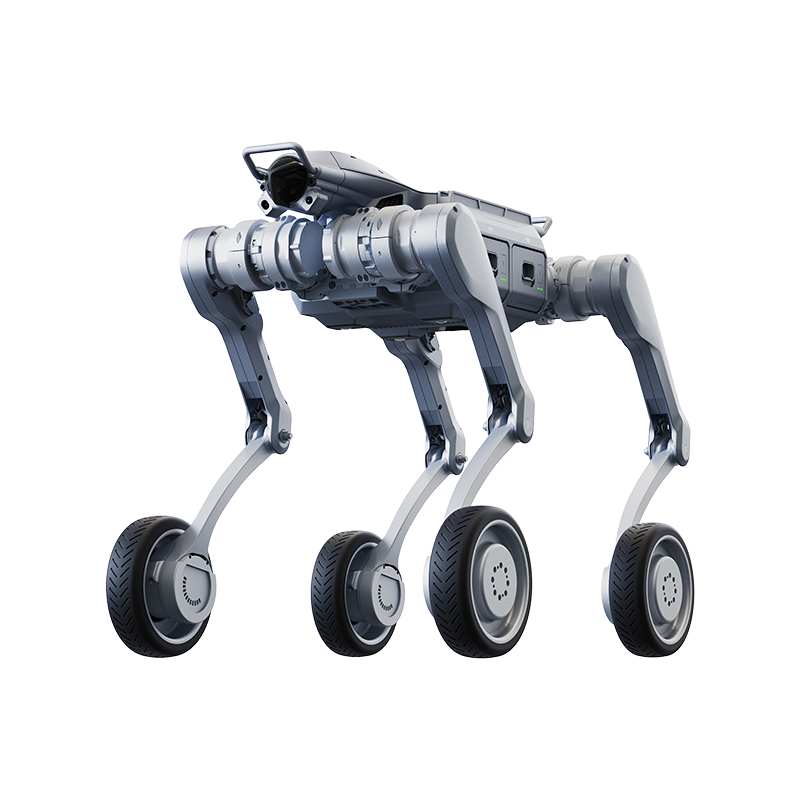
| 轮足机器狗 | 站立尺寸:700x430x500mm 重量(带电池):约18kg 运动速度:0-2.5m/s 轮胎:7寸充气胎 攀爬落差:70cm 续航时间:1.5-3h 传感器:具备深度相机和雷达
|
| 远程OTA升级 | 支持 |
| 操作系统 | 支持Ubuntu、ROS,提供各类功能算法代码及说明,提供运动控制接口 |
| 四足机器狗 | 站立尺寸:700x310x400mm 重量(带电池):约15kg 载荷:8kg,极限载荷12kg 运动速度:0-3.7m/s,极限速度5m/s 续航时间:约2-4h 传感器:深度相机和雷达 语音交互:内置语音识别模块, 具备语音交互功能
|
| 行业级机器狗 | 站立尺寸:1098x550x758mm 整机重量:75kg(含电池12kg) 负载:持续行走负载>40kg,最大站立负载120kg 续航时间:4-6h 移动速度:20km/h 感知传感器:深度相机*2+光学相机*2 创新结构:可实现足式/轮足变换
|
| 二次开发 | 支持 |
| 远程控制 | 支持远程云操控, 可跨城市超远距离控制, 延时≤200ms |




 Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877
Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877 商务合作:18062020215
销售咨询:18062020221
服务热线:027-87522899
 |
 |