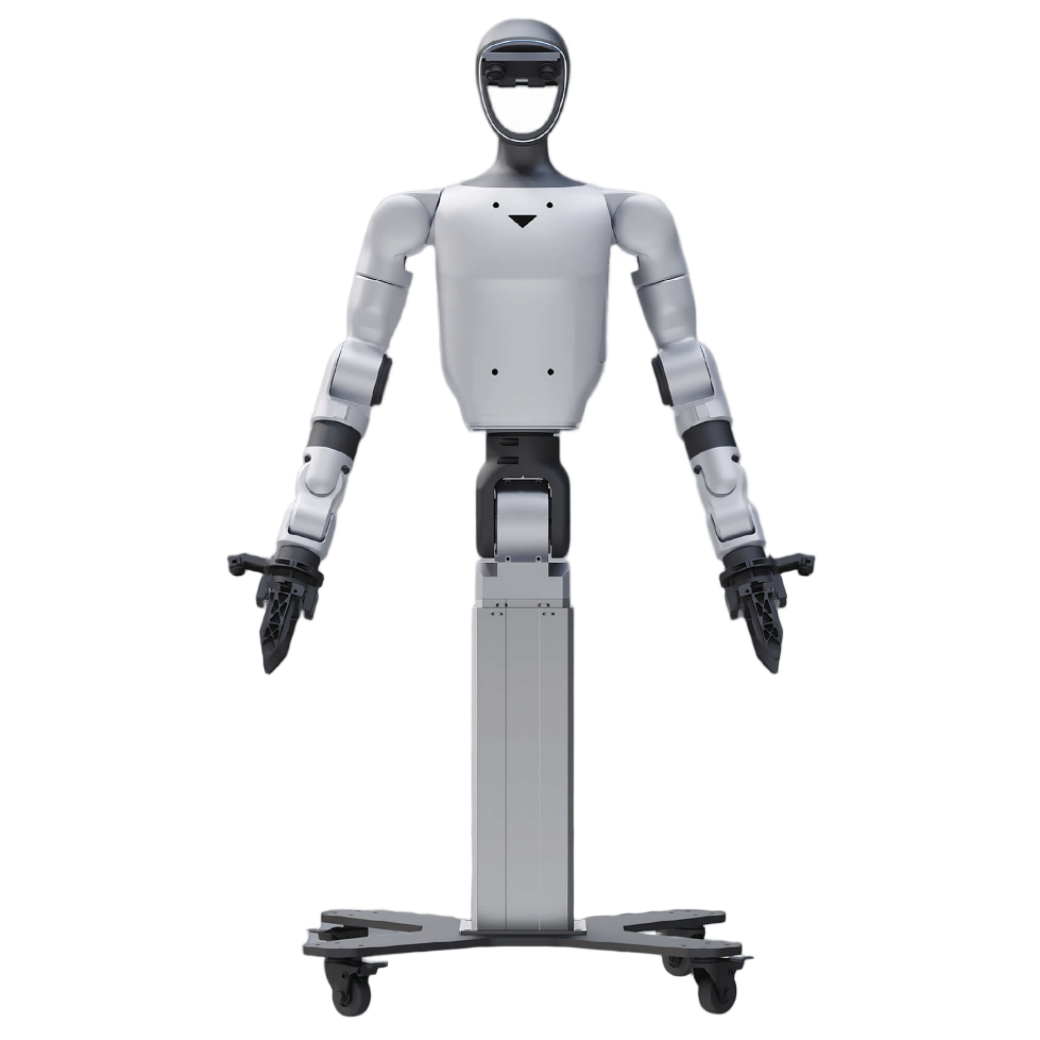
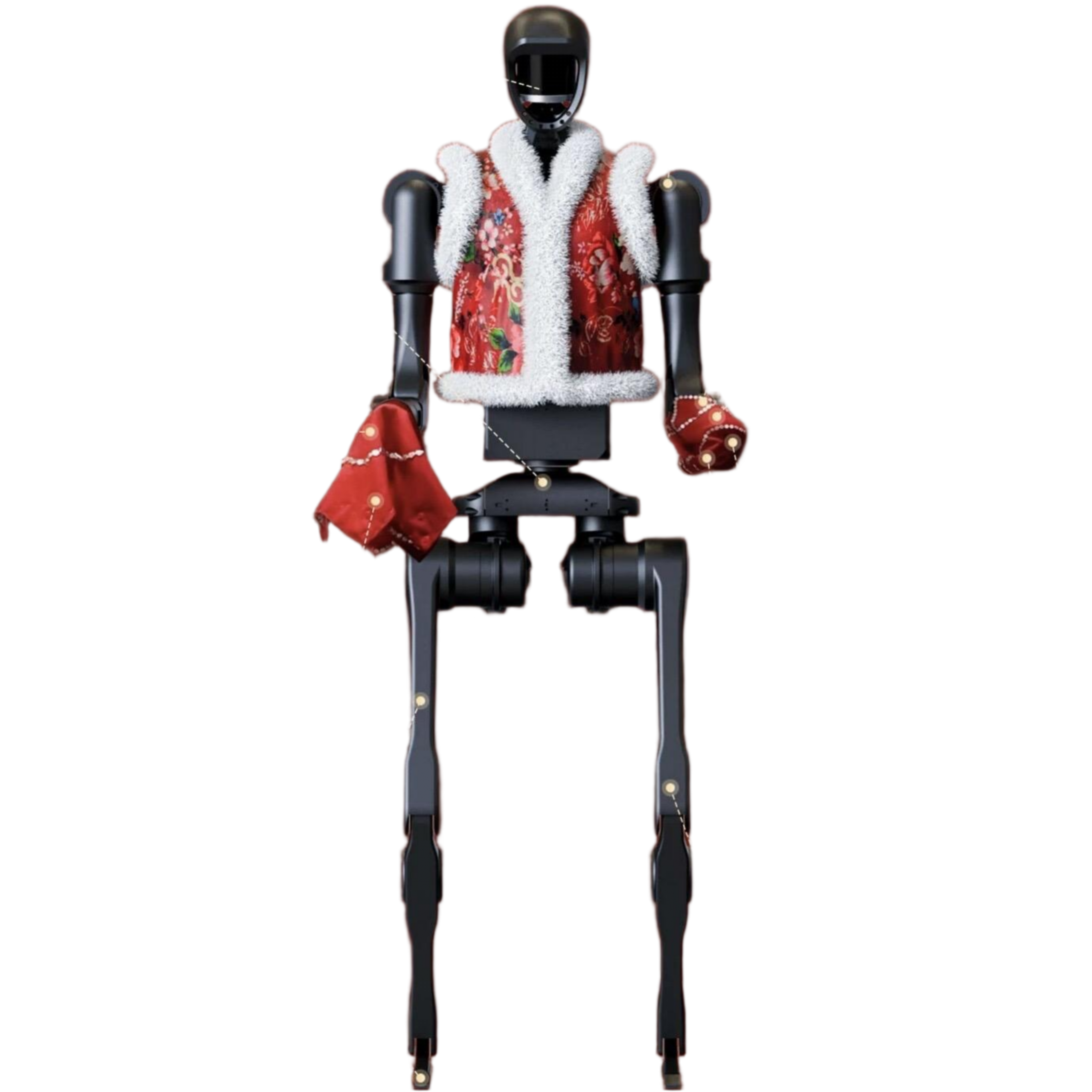
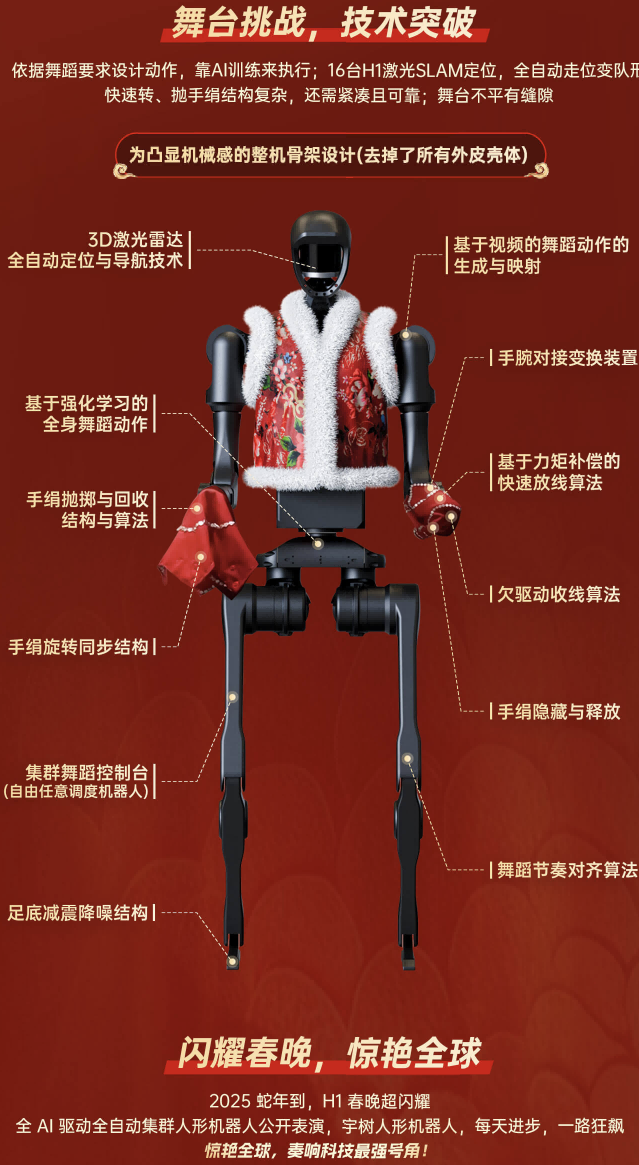
H1-Res是H1仿人形机器人系列里面科研型开源机器人。于2025年1月28日登上2025年春晚舞台,表演由张艺谋执导的《秧BOT》。该H1人形机器人采用轻量化材料设计,整体重量只有47kg,整身拥有50余个自由度,行走姿态轻盈稳健,尤为突出的H1-Res腿部关节电机部分,峰值扭矩达到了360N·m,并且配合中空轴线和双编码器,全面对标特斯拉Optimus人形机器人。 H1-Res人形机器人专用自研的扭矩密度更高的M107关节电机。应用在H1-Res人形机器人的两个膝关节上,峰值扭矩达到360N·m,而髋关节电机扭矩则为220N·m,踝关节为45N·m,手臂关节则为75N·m。目前H1关节单元中核心零部件包括伺服电机、减速器、控制器均为国内自研自产。H1的运动能力尤为强悍,移动速度3.3m/s(世界记录),潜在运动性能可达5m/s。

| 关键尺寸 | (1520+285)mm × 570mm × 220mm |
| 手臂总长度 | 338mm × 2 |
| 单手臂自由度 | 4(可拓展) |
| 关节单元极限扭矩 | 膝关节约360N.m,髋关节约220N.m,踝关节约45N.m,手臂节约75N.m |
| 电池 | 容量15Ah(0.864KWh),最大电压67.2V |
| 感知传感器配置 | 3D激光雷达 + 深度相机 |
| *注: 产品持续迭代优化,略有不同,请以实际收货为准 |
| 大腿和小腿长度 | 400mm × 2 |
| 单腿自由度 | 髋关节 × 3 + 膝关节 × 1 + 踝关节 × 1 = 5 |
| 整机重量 | 约 47kg |
| 行走速度 | 3.3m/s(潜在运动能力 >5m/s) |
| 控制和感知算力 | 标配:Intel Core i5(平台功能),Intel Core i7(用户开发) 选配:Intel Core i7或Nvidia Jetson Orin NX |
| 灵巧手 | 选配(正在开发) |








 Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877
Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877 渠道商务合作:18062020215
售前技术咨询:13807184032
售后服务热线:18062020228
 |
 |