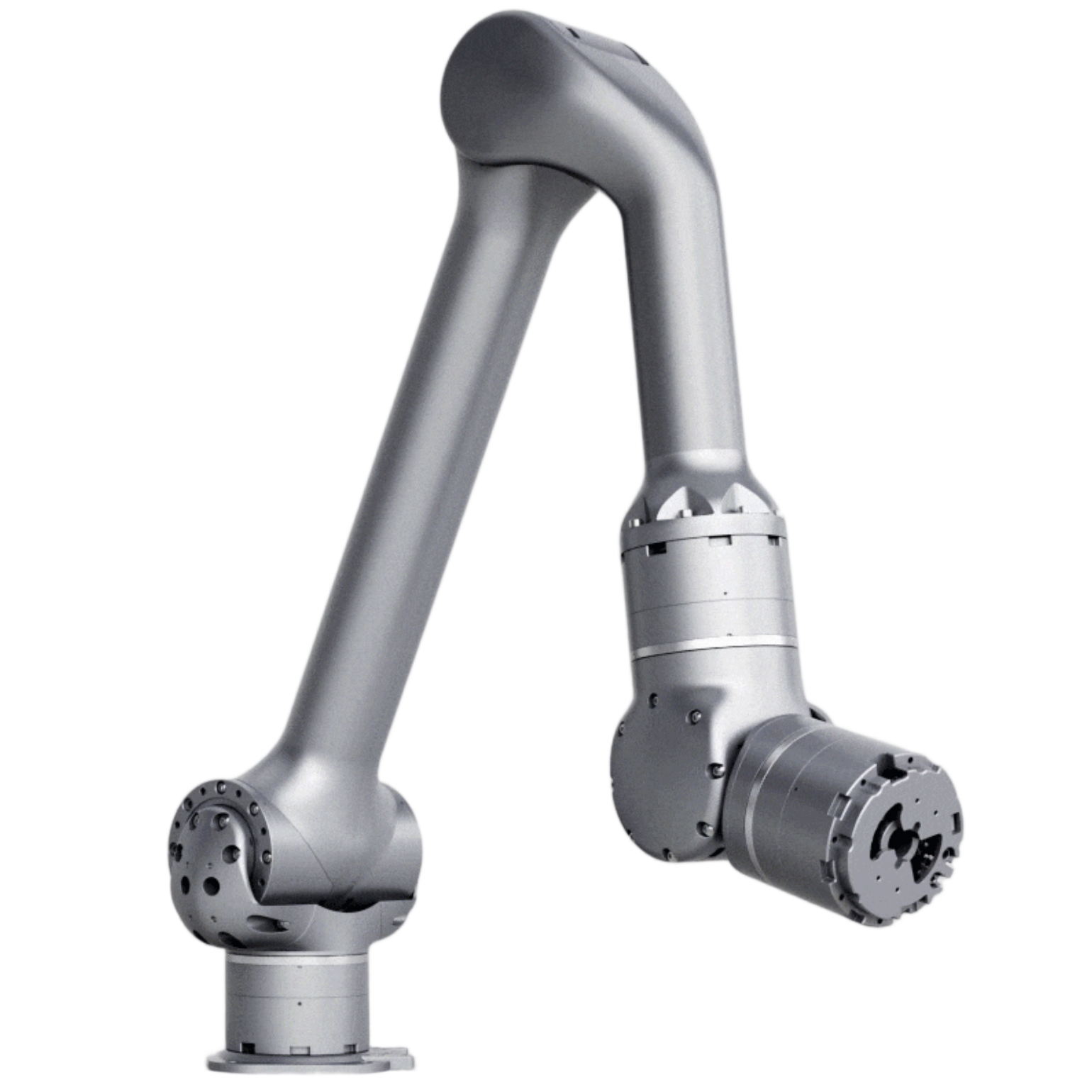
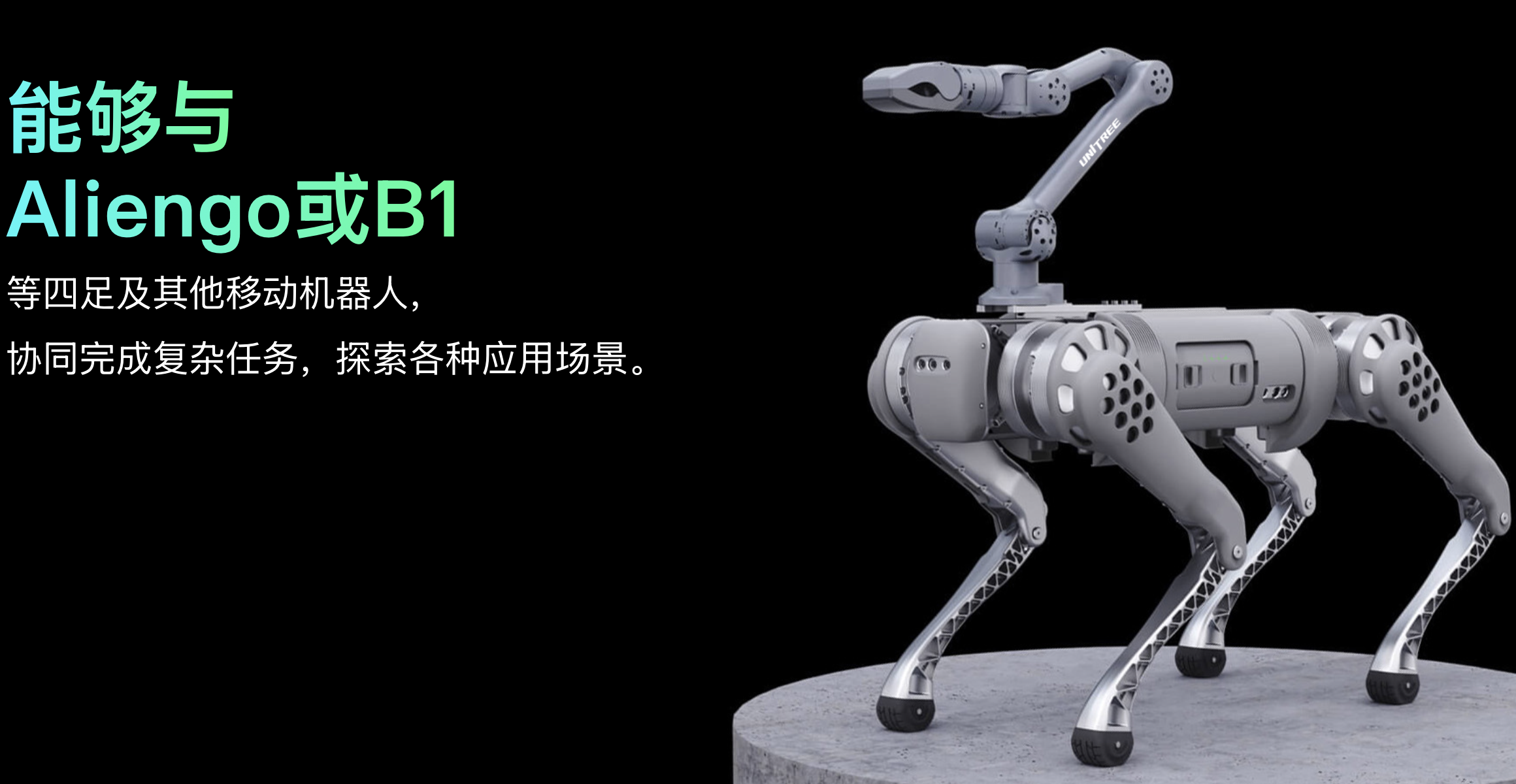
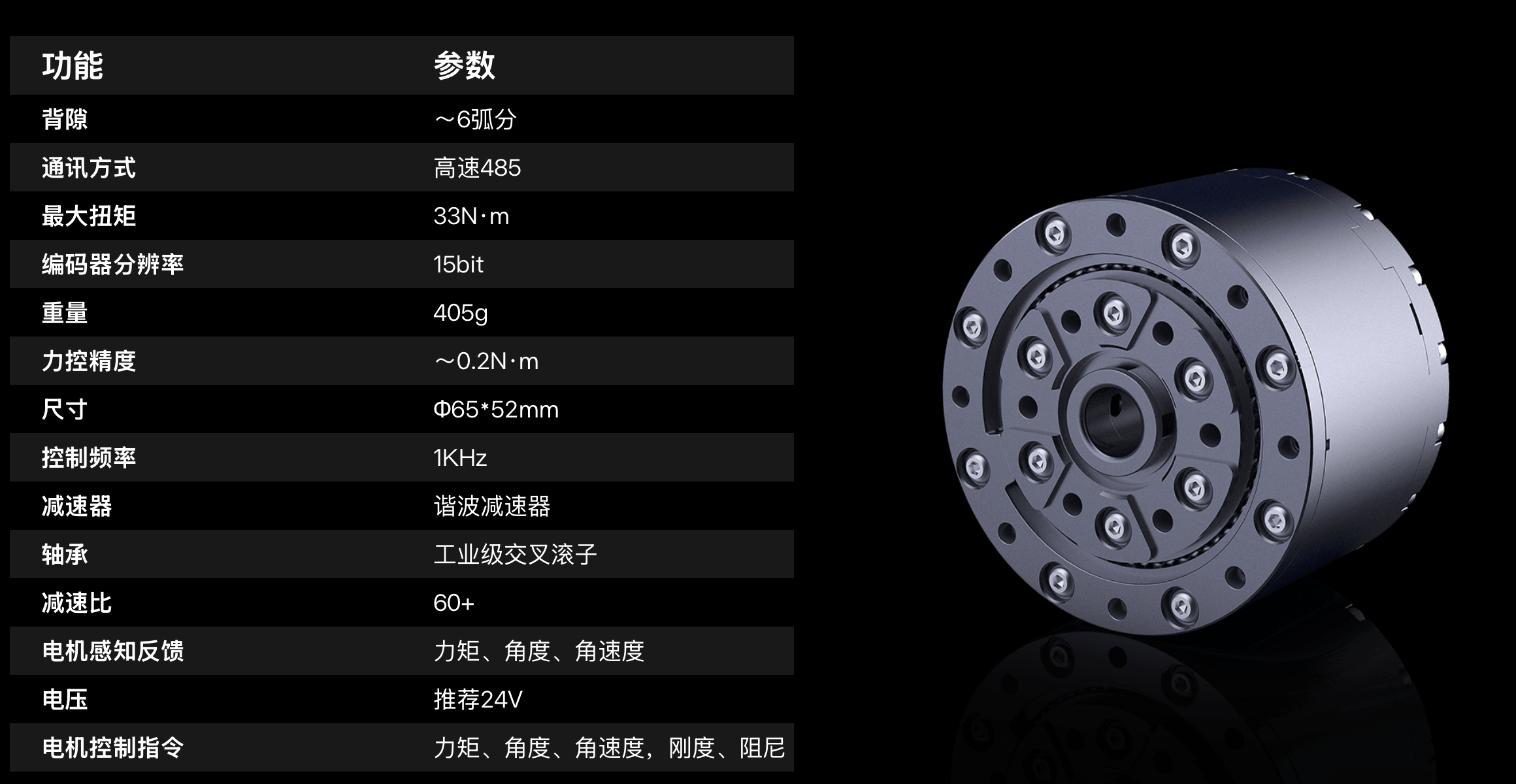
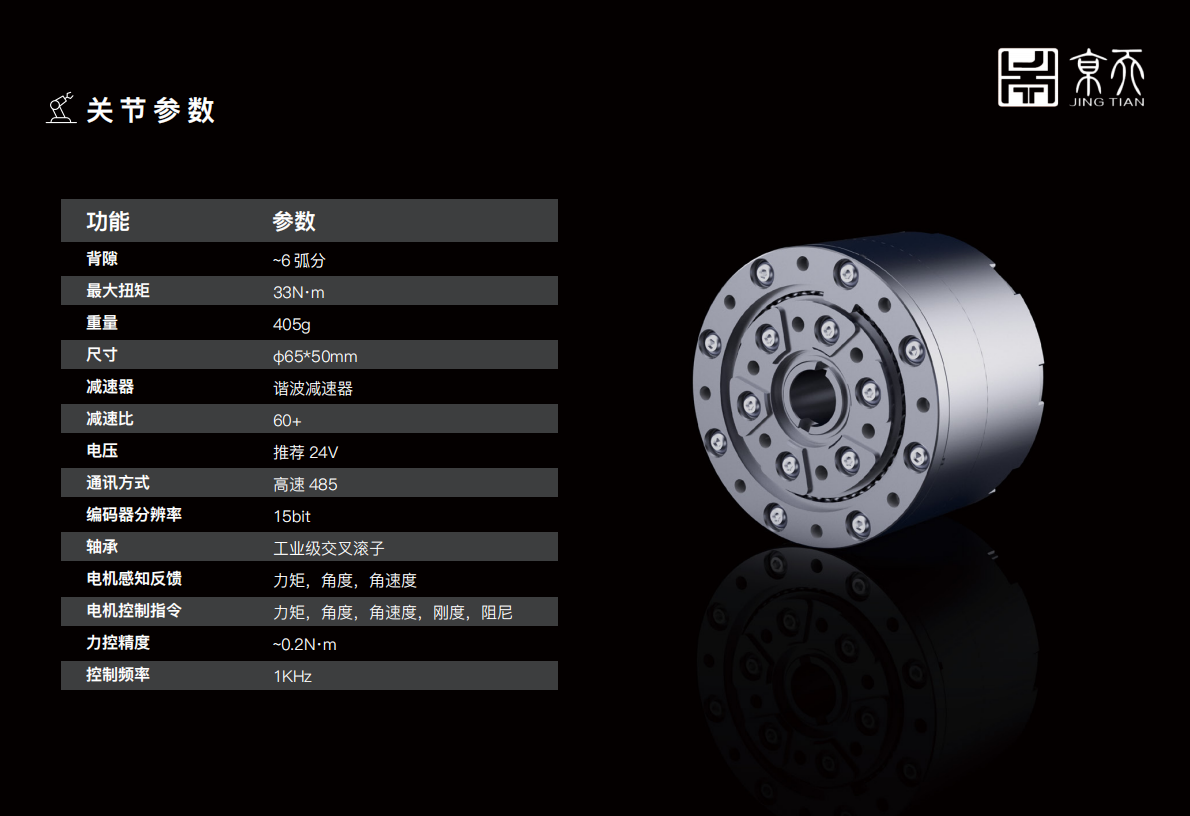
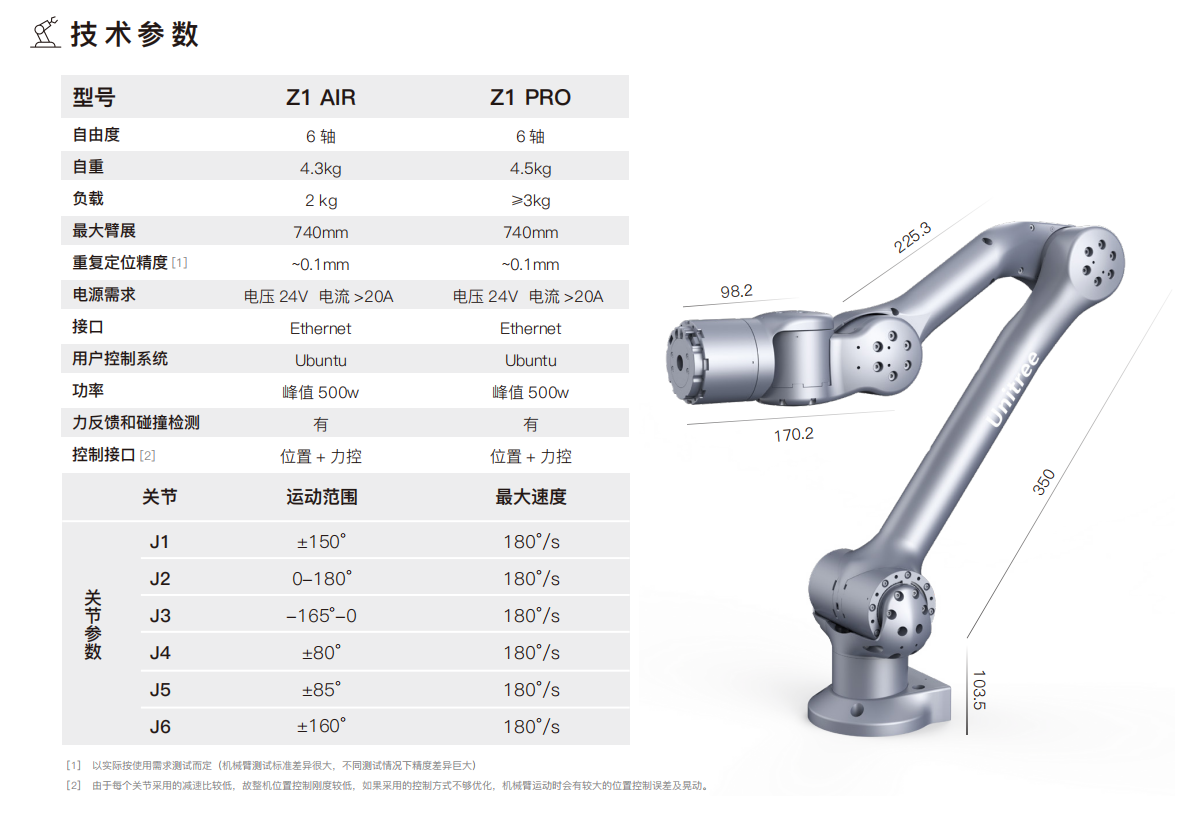
宇树科技Z1是专为移动机器人(四足/轮式/履带)设计的6轴轻量灵巧机械臂,主打机载集成、力控、高精度、快换末端,适配宇树A2/B2/B1/Aliengo等四足平台,也可搭载其他移动机器人完成抓取、操作、巡检等任务。6轴,两个版本,Z1 Air重约4.3kg,负载2公斤;Z1 Pro重约4.5kg,负载3-5公斤。臂展:740mm,重复定位精度:≈0.1mm,关节扭矩:单关节最大33N·m;力控精度:≈0.2N·m;供电:24V,最大500W;控制:位置+力控;碰撞检测;Ubuntu+ROS;以太网/RS485;关节:谐波减速器、工业交叉滚子轴承、15bit编码器。应用场景包含:移动机器人机载操作(抓取、开门、拧螺丝);电力/工业巡检、消防救援、勘探搜救;电商物流、仓储分拣、服务机器人、科研教学等

| 自由度 | 6 |
| 负载 | 2公斤(Z1 AIR),3-5公斤(Z1 PRO) |
| 重复定位精度 | ~0.1mm |
| 接口 | Ethernet |
| 功率 | 峰值500w |
| 控制接口 | 位置+力控 |
| 关节参数(最大速度) | J1(180°/s)、J2(180°/s)、J3(180°/s)、J4(180°/s)、J5(180°/s)、J6(180°/s) |
| 自重 | 4.3公斤(Z1 AIR),4.5公斤(Z1 PRO) |
| 最大臂展 | 740mm |
| 电源需求 | 电压24V 电流>20A |
| 用户控制系统 | Ubuntu |
| 力反馈和碰撞检测 | 有 |
| 关节参数(运动范围) | J1(±150° )、J2(0-180°)、J3(-165°-0)、J4(±80°)、J5(±85°)、J6(±160°) |



 Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877
Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877 渠道商务合作:18062020215
售前技术咨询:13807184032
售后服务热线:18062020228
 |
 |