



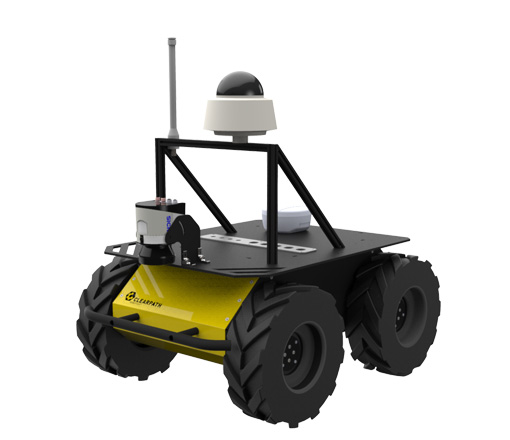
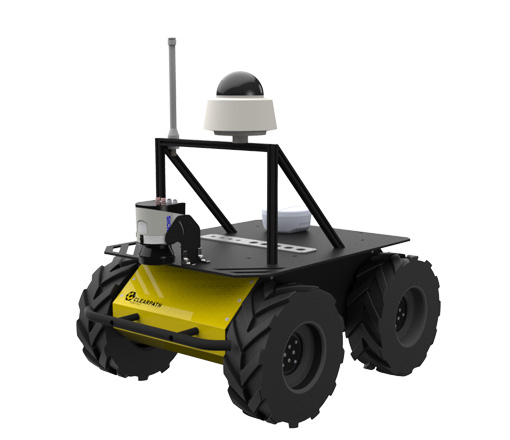
Husky is a medium-sized robot development platform. Its huge load capacity and power system can adapt to various payloads, and can be customized according to research needs. Our integration experts can add stereo cameras, LiDAR, GPS, IMU, manipulators, etc. to UGVs. Husky's sturdy structure and high torque transmission system can take your research to places where other robots cannot work. Husky has gained sufficient support in ROS through community driven open source code and examples.
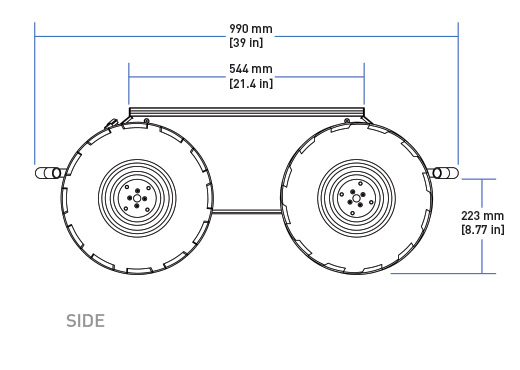
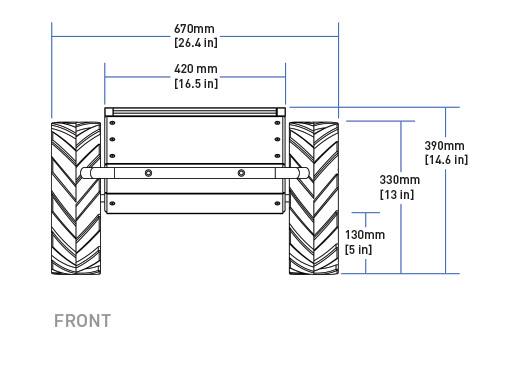
| EXTERNAL DIMENSIONS | 990 x 670 x 390 mm |
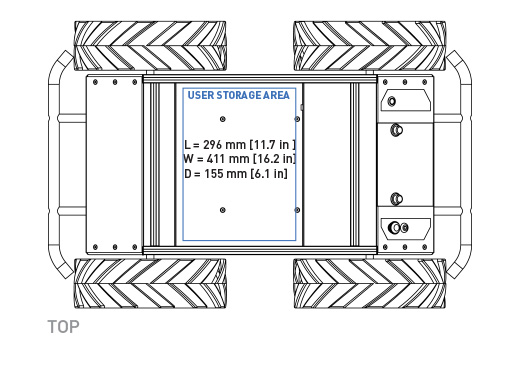
| INTERNAL DIMENSIONS | 296 x 411 x 155 mm |
| MAX PAYLOAD | 75 kg |
| Quadrature encoder | 78000pulses/m |
| MAX SPEED | 1.0 m/s |
| RUN TIME (TYPICAL USE) | 3 hours |
| USER POWER | 5V, 12V and 24V fused at 5A each |
| DRIVERS AND APIS | ROS, C++ Library, Mathworks |

Velodyne

NovAtel

SICK

Universal Robots










Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877
Robot System Integration
Artificial Intelligence Robots
Mobile Robot
Collaborative Robotic Arm
ROS modular robot
Servo and sensor accessories
Scientific Research
Professional Co Construction
Training Center
Academic Conference
Experimental instruction
Jingtian Cup Event
Business cooperation: 18062020215
18062020215@qq.com
Pre sales technical support:
Tel 13807184032
 |
 |
































