



The SR-RH8D artificial hand has advanced mechanical capabilities and real-time high-frequency data feedback: position, speed, PWM output and high-resolution current measurement. Through the combination of these parameters, the user can infer various information, for example, an estimate of the magnitude of the force. Specially designed fingers can achieve magnetic detachment, using Dyneema (a Kevlar fiber) tendon, and reinforcement of the shell and elbow attachments. These designs ensure the safety and durability of the user's daily use.
| Technical index | 一、Artificial hand
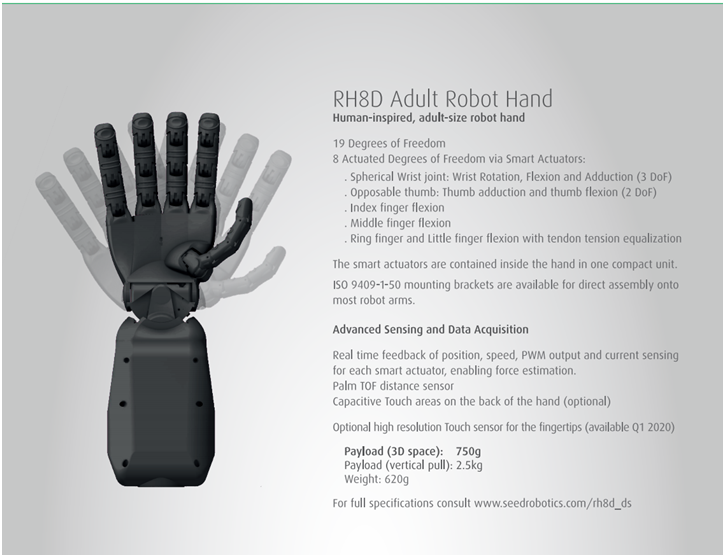
RH8D has 19 degrees of freedom, including the contralateral thumb and a complete spherical wrist joint. In addition, the three fingers are independently controlled by smart actuators. The under-actuated design aims to achieve fine user control while also taking into account the adaptation to objects of different shapes.
二、Dexterity
With 8 compact and powerful actuators, users can individually control: 1. Wrist rotation, wrist flexion and wrist adduction; 2. Thumb adduction and thumb flexion; 3. The index finger is flexed; 4. Middle finger flexion; 5. The joint action of the ring finger and the little finger is balanced with the tension of the tendon (each finger is in the same shape as the object). 三、Perceptual
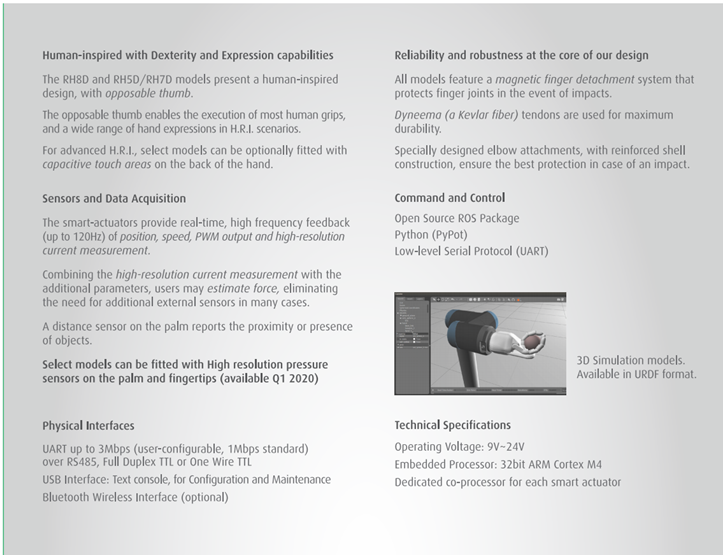
The advanced EROS control board and smart actuator provide real-time, high frequency feedback up to 120 Hz (all data for driving joints are available): 1. Location; 2. Speed; 3. Temperature; 4. PWM output (with direction); 5. High-resolution current measurement. The TOF distance sensor on the palm can detect the proximity of objects. By combining the available data, users can infer other information, such as force estimates. Capacitive gaskets can be selectively installed on the back of the hand to gain richer H.R.I experience. 四、Controllability 1. Open source ROS software package; 2. Python (PyPot); 3. Low-level serial protocol (UART). 五、Logical interface 1. UART ends RS 485 (or full-duplex or half-duplex TTL compatible with Robotis system); 2. USB interface: used for configuration and maintenance; 3. Optional Bluetooth: online maintenance and diagnosis. 六、Performance and payload The gripping force of each internal actuator can reach 6kg/cm, providing: 1. Effective load (vertical tension): 2.50kg; 2. Payload (3-dimensional space): 750g; 3. Weight: 620 grams (all actuators are included in the unit). When assembling on the robot arm, if possible, you can rotate the DoF around the built-in wrist and use the arm's own rotating DoF. 七、Technical data 1. Power supply voltage: 9V to 24V; 2. Embedded processor: 32-bit ARM Cortex M4 each smart actuator has a dedicated coprocessor. Provide ISO 9409-1-50 mounting adapter (suitable for most robot arms), customized adapters can also be produced on customer requirements. |

Collaborative robotic arm

双区电容触摸区+蓝牙模块
3维触觉传感器

机械臂安装包


Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877
Robot System Integration
Artificial Intelligence Robots
Mobile Robot
Collaborative Robotic Arm
ROS modular robot
Servo and sensor accessories
Scientific Research
Professional Co Construction
Training Center
Academic Conference
Experimental instruction
Jingtian Cup Event
Business cooperation: 18062020215
18062020215@qq.com
Pre sales technical support:
Tel 13807184032
 |
 |


































![JCR796IZAU1YM~P79K]_FO3.png](/data/upload/image/20200709/1594283920624585.png "1594283920624585.png")
