


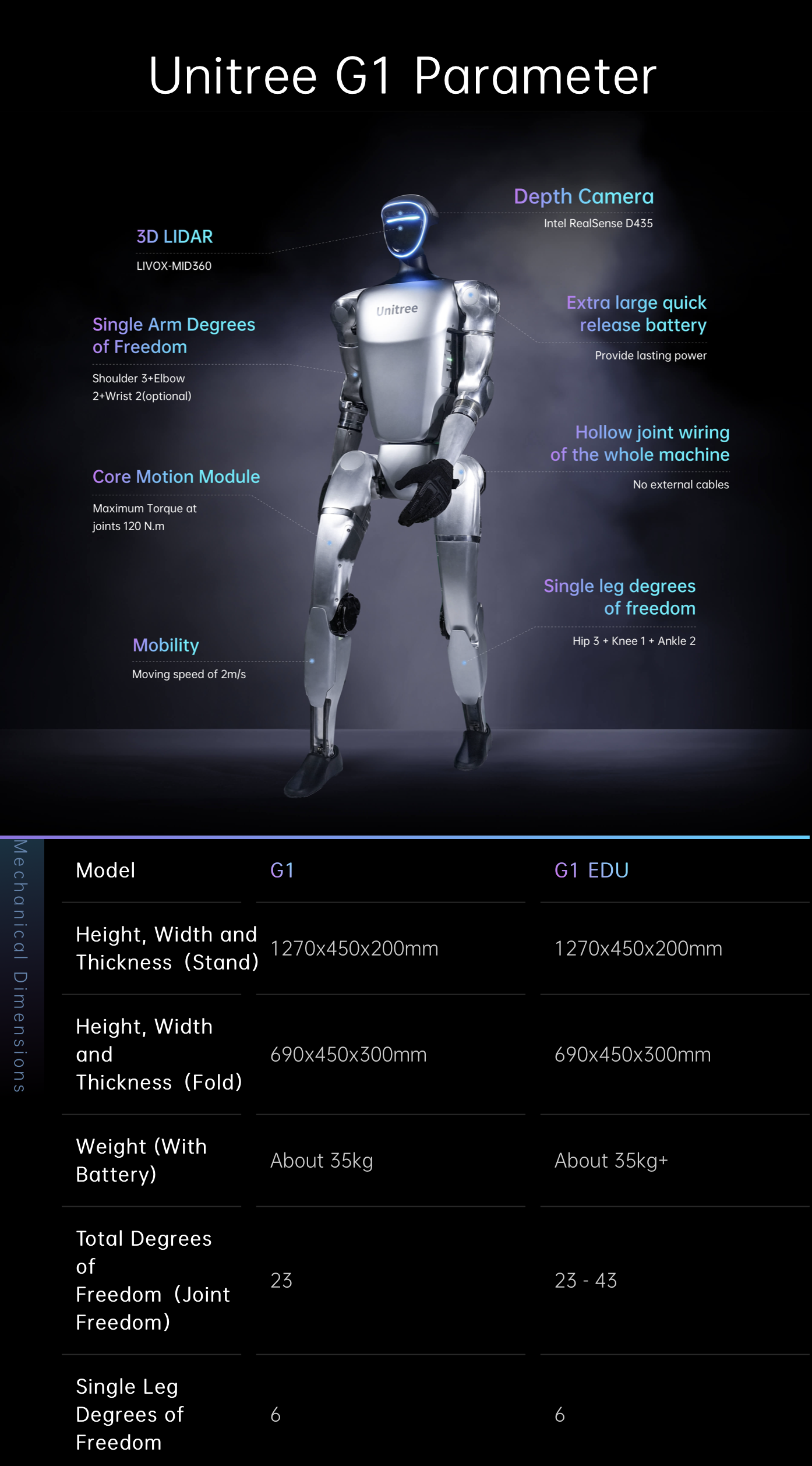
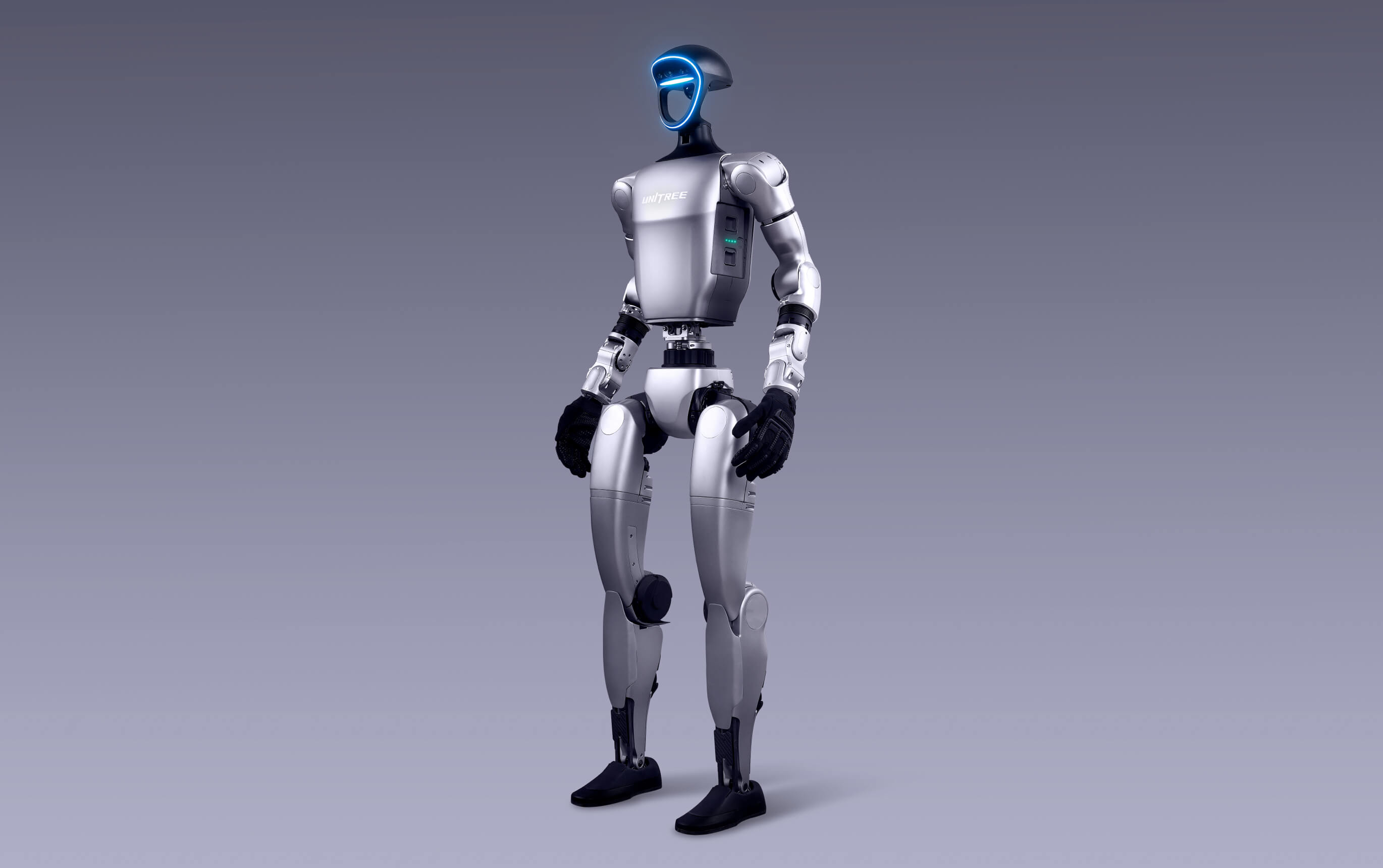
G1 Edu is an open-source model of the Unitree humanoid robot G1 series aimed at educational users. The G1-Edu humanoid robot is designed with lightweight materials, with an overall height of 127cm and a weight of approximately 35kg. It has 23 to 43 degrees of freedom (which can be increased or decreased according to needs), and its walking posture is light and stable. The entire machine has hollow joint wiring and no external cables. The peak torque of the core motion module reaches 120N · m, and the fastest speed can reach 2m/s. In addition to LiDAR and depth camera, it is also equipped with a 3-finger force control dexterous hand (optional accessories for installing a multi-point tactile array).

| Height, Width and Thickness(Stand) | 1270x450x200mm |
| Total Degrees of Freedom(Joint Freedom) | 23-43 |
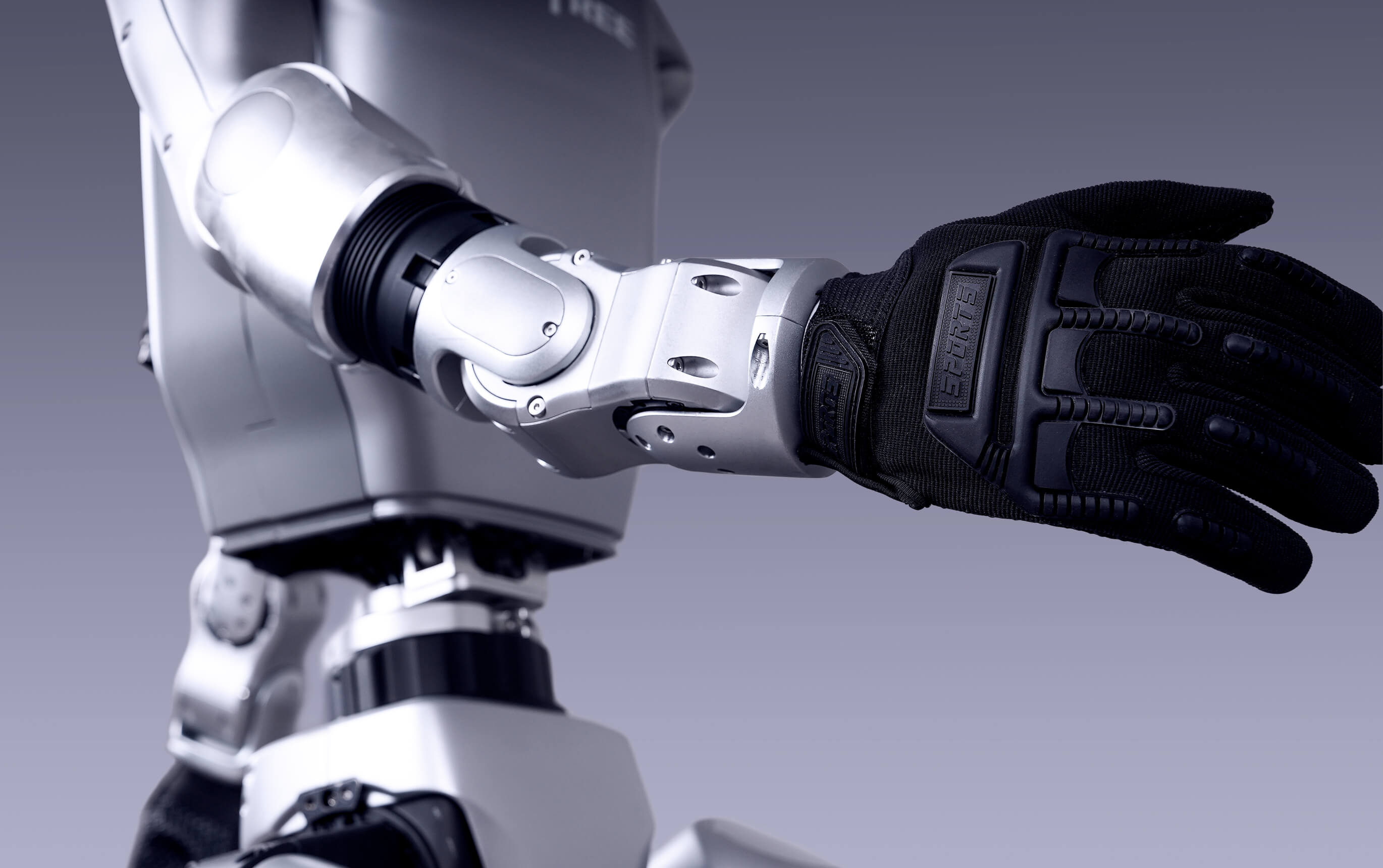
| Single Arm Degrees of Freedom | 5 |
| Maximum Torque of Knee Joint | 120N.m |
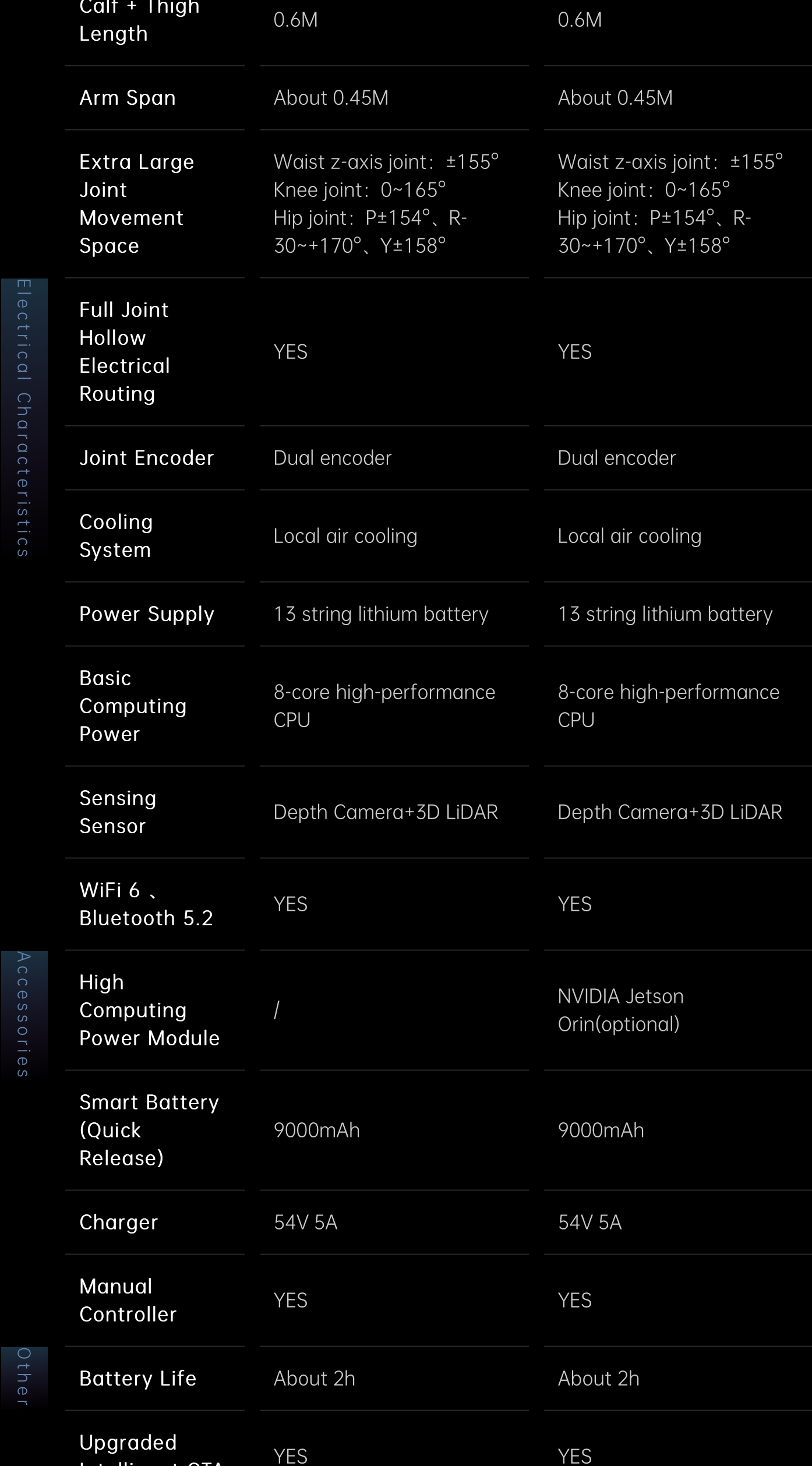
| Calf + Thigh Length | 0.6M |
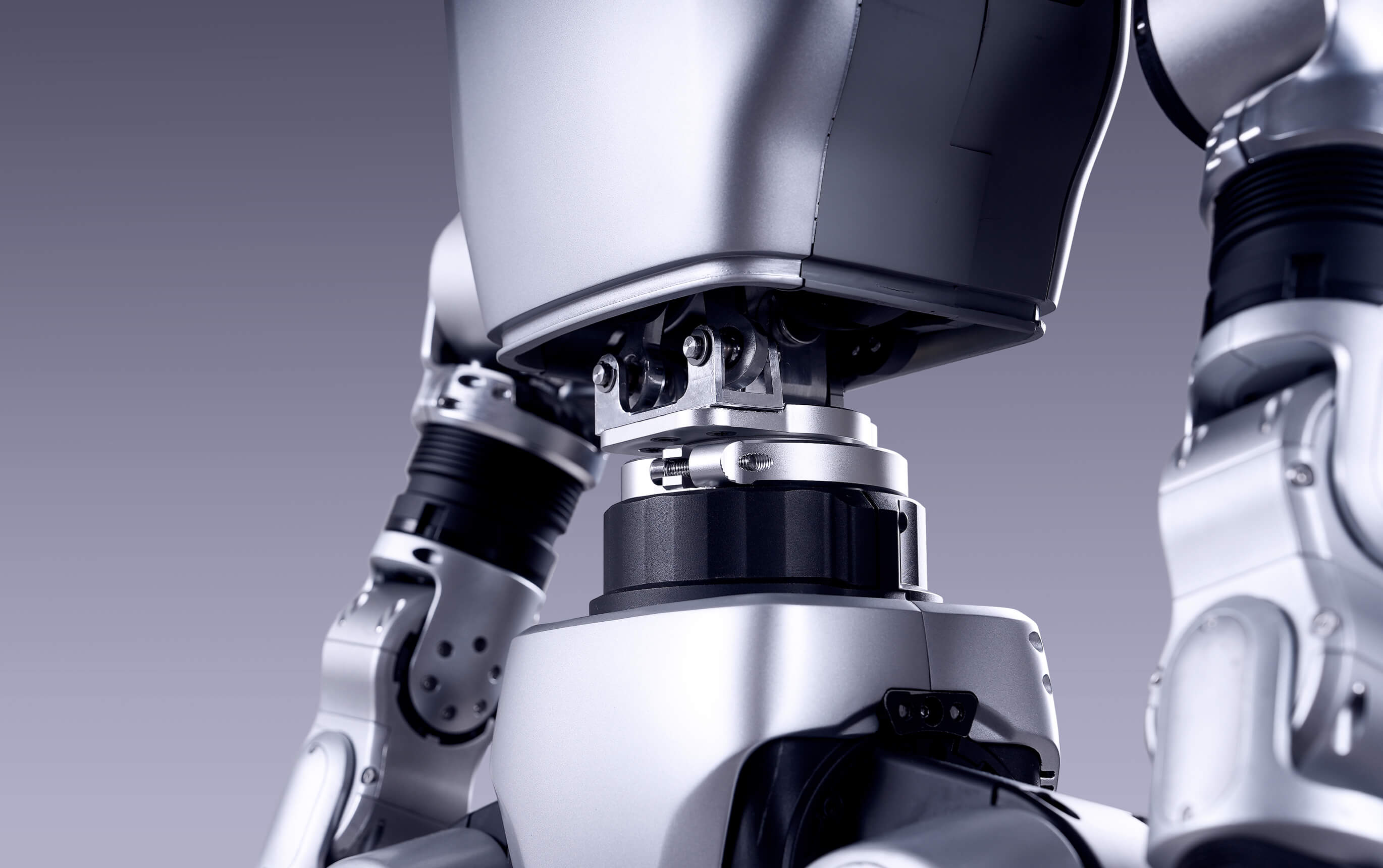
| Extra Large Joint Movement Space | Waist z-axis joint:±155° Knee joint:0~165° Hip joint:P±154°、R-30~+170°、Y±158° |
| Joint Encoder | Dual encoder |
| Weight (With Battery) | About 35kg+ |
| Single Leg Degrees of Freedom | 6 |
| Waist Degrees of Freedom | 1+(Optional 2 additional waist degrees of freedom) |
| Single Hand Degrees of Freedom | 7(Optional Force control of three-fingered hand)+2(Optional 2 additional wrist degrees of freedom) *Three-fingered dexterous hand Dex3-1 Parameter: The thumb has 3 active degrees of freedom; the index finger has 2 active degrees of freedom; the middle finger has 2 active degrees of freedom. **Dex3-1 can optionally be installed with tactile sensor arrays |
| Arm Maximum Load | About 3Kg |
| Arm Span | About 0.45M |
| Full Joint Hollow Electrical Routing | YES |
| Basic Computing Power | 8-core high-performance CPU |





Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877
Robot System Integration
Artificial Intelligence Robots
Mobile Robot
Collaborative Robotic Arm
ROS modular robot
Servo and sensor accessories
Scientific Research
Professional Co Construction
Training Center
Academic Conference
Experimental instruction
Jingtian Cup Event
Business cooperation: 18062020215
18062020215@qq.com
Pre sales technical support:
Tel 13807184032
 |
 |
































