



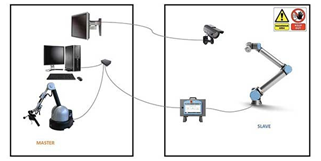
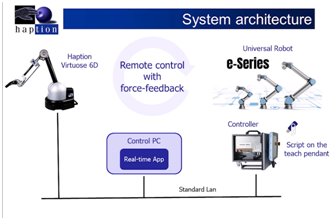
Virtuose 6D is a force feedback system with 6 degrees of freedom, specially designed for virtual reality working environment. Due to its large working space and high bearing capacity, it can be interactively simulated with CAD models. Especially suitable for the following scientific research: ergonomics analysis, physical interaction research, assembly simulation, project inspection, remote operation, gesture operation. Application areas: ergonomics analysis, functional testing, assembly/disassembly, working environment simulation, operator training, Medical training, remote surgery, etc.
| Number of arm joints | 6 joints |
| Typical TCP speed of robotic arm | 1 m/s |
| Gripper stroke | 0-106mm |
| Accuracy of the gripper | 0.088° |
| Maximum load-bearing force | 31N |
| Continuous torque (rotation) | 1 N.m |
| Maximum control stiffness (rotation) | 30 Nm /rad |
| Joint rotation range | ±360° |
| Robotic arm load | 10 kg |
| Repeated positioning accuracy of robotic arm | ±0.05 mm |
| Gripper load | 5 kg |
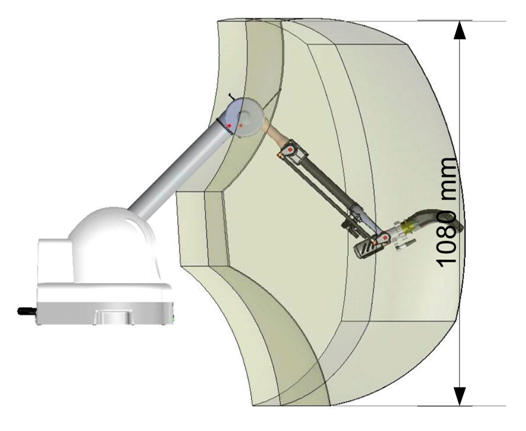
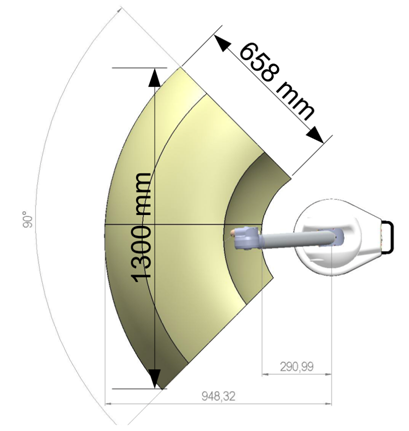
| Manipulation space | ≥1330×575×1020mm |
| Maximum torque (rotation) | 3.1 N.m |
| Maximum control stiffness (translation) | 1800 N / m~8000N / m |
| Number of keys—3 | (2 programmable) |

柔性机械臂

力传感协作机械臂





Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877
Robot System Integration
Artificial Intelligence Robots
Mobile Robot
Collaborative Robotic Arm
ROS modular robot
Servo and sensor accessories
Scientific Research
Professional Co Construction
Training Center
Academic Conference
Experimental instruction
Jingtian Cup Event
Business cooperation: 18062020215
18062020215@qq.com
Pre sales technical support:
Tel 13807184032
 |
 |
































