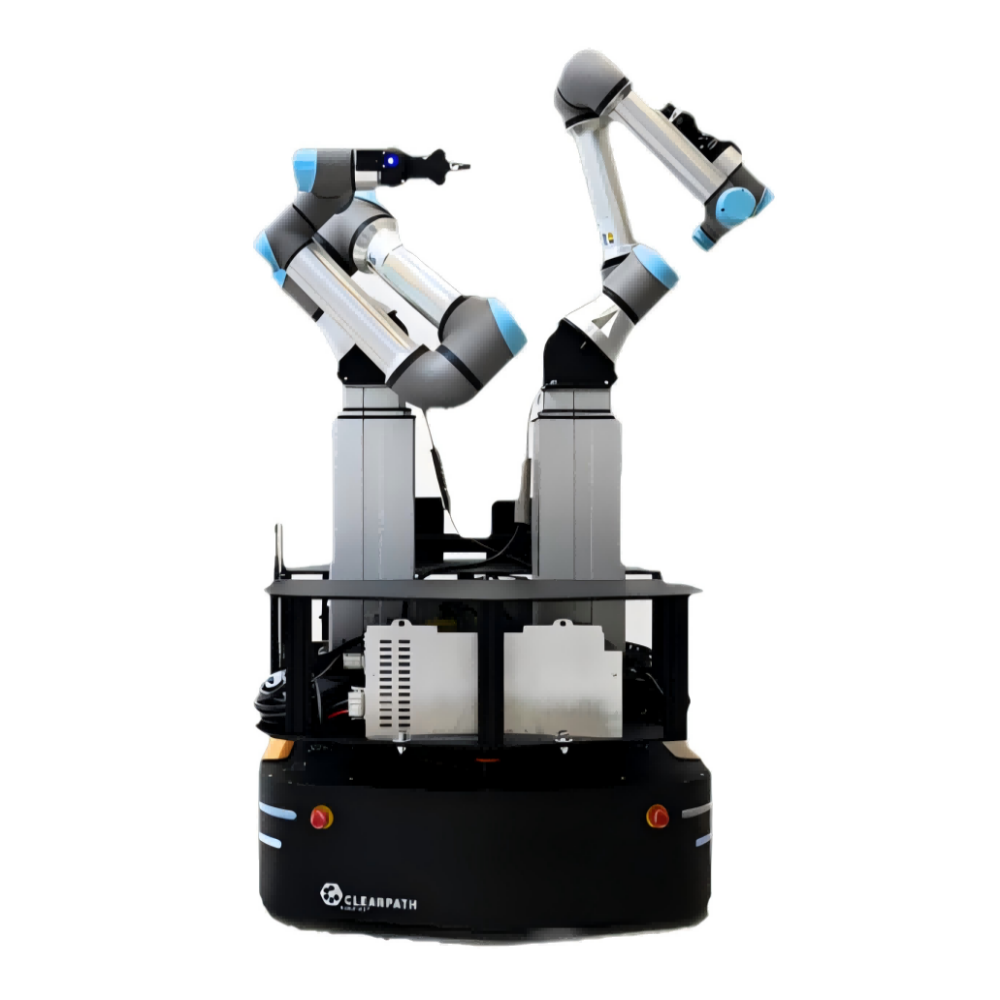
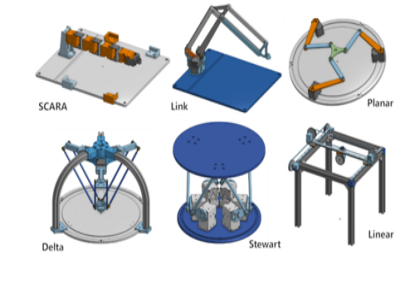
手持机械臂是一款性能卓越完全开源的机器人操作平台,拥有六种经典形态变形;完善的二次开发,支持ROS、matlab仿真、C++、Python等编程;操作简单易上手让用户获得更好的机器人体验。机械臂的末端工具可根据用户需求进行更换,机体除了金属衔接件,其他骨架均可3D打印。
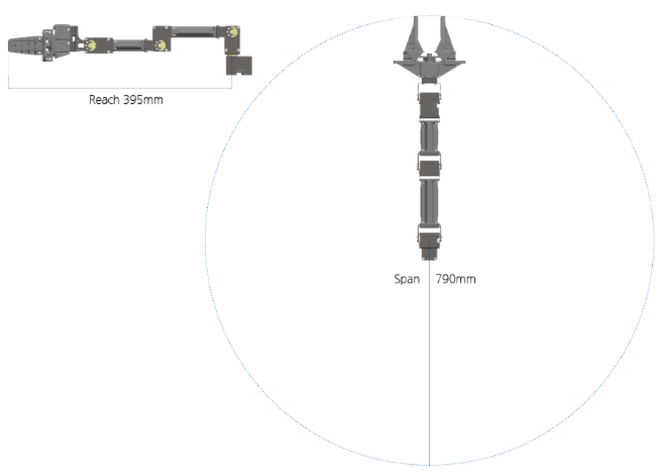
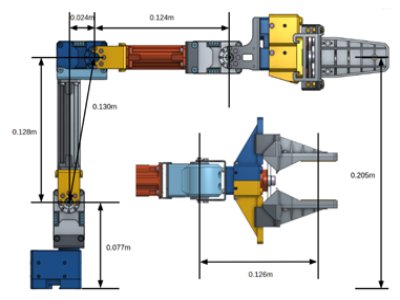
| 机械臂参数 |
|





 Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877
Donghu Robot Laboratory, 2nd Floor, Baogu Innovation and Entrepreneurship Center,Wuhan City,Hubei Province,China
Tel:027-87522899,027-87522877 渠道商务合作:18062020215
售前技术咨询:13807184032
售后服务热线:18062020228
 |
 |